-
 29 04庐阳区附近外呼机器人销售价格
29 04庐阳区附近外呼机器人销售价格⒉ 网络接口以太网10M/100M网络协议:TCP/IP网络操作系统:UNⅨ、WINDOWS NT⒊数据库接口ORACLE、SYBASE、INFORMⅨ、SQL Server等⒋ 系统容量数字接口:单机30、60、90、120、240路坐席接口:单机8、16、32、64路⒌ 系统硬件板卡接口特性端口类型 Loop Start 振铃侦测 3... 【查看详情】
-
 28 04合肥定做智能客服服务电话
28 04合肥定做智能客服服务电话“AI客服虽然快捷,但我认为AI客服无法替代人工客服。”张先生表示,他希望未来的智能客服能够在提升效率的同时,更加注重人性化服务,让消费者能够真正感受到温暖和关怀。 [4]记者拨打了包含快递、旅游、支付等行业在内的十余家**企业的客服热线,测试时发现多数企业转接人工服务的时间较长,且过程繁琐。AI客服通常会先询问用户的问题类型,并要求用户... 【查看详情】
-
 28 04蜀山区办公用外呼机器人服务热线
28 04蜀山区办公用外呼机器人服务热线外呼(Outbound),通信术语,是现代客户服务中心系统呼出服务主动发起对客户的呼叫。2025年3月15日,2025年央视3·15晚会曝光第七个行业乱象:AI外呼机器人成*扰电话帮凶。外呼(Outbound)是指:电话通过电脑自动往外拨打用户电话,将录制好的语音通过电脑播放给用户,它是电脑Computer 电话Telephony 集成一... 【查看详情】
-
 28 04庐阳区上门安装外呼系统单价
28 04庐阳区上门安装外呼系统单价呼出媒体主要采用以下几种或根据要求添加其它手段:手机短消息:利用与手机服务商设立接口通讯机。BP机自动台:利用与传呼台的自动台提示功能实现代码呼出。E-MAIL:利用INTERNET服务。电话:利用电信的公共网发送语音或其他信息。传真:和电话原理相同。IP电话:呼叫先采用IP的方式,通过互联网传输,然后转换成PSTN。系统电话主动呼出主要... 【查看详情】
-
 28 04淮南上门安装外呼机器人标准
28 04淮南上门安装外呼机器人标准⒊ 客户留言发起(不及时或及时)呼叫。⒋ 客户听取留言回复。⒌ 客户听取系统留言。⒍ 客户听取客户留言。⒎设置/修改语音信箱密码短消息恒生客户服务中心系统提供短消息服务器来处理、存储转发短消息。短消息服务器接收短消息呼叫,在向ICM请求作统一的排队处理;如果系统暂时不能即时的处理时短消息服务器会将该消息保存待以后在发起呼叫。而发起短消息的... 【查看详情】
-
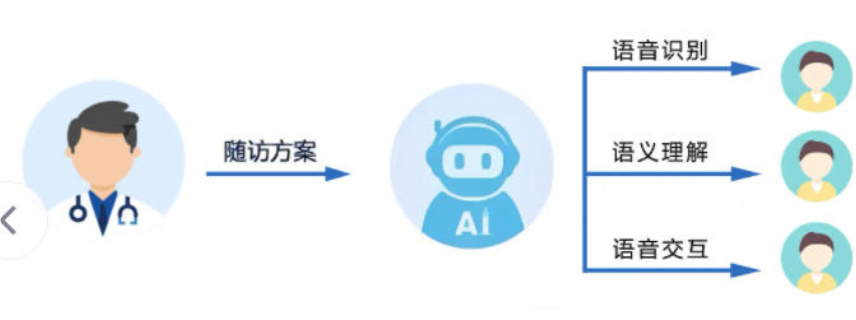
28 04包河区办公用智能客服对比价
智能客服是依托自然语言处理(NLP)、深度学习与大规模知识处理技术构建的自动化服务系统,具备24小时响应能力和多任务并发处理能力 [1]。其**技术包括语义解析引擎、动态知识库管理和多模态交互设计,在电商、金融、医疗等领域实现自助应答、智能导航与人机协作功能 [3]。通过自动化分流机制降低企业30%以上人力成本,并通过用户咨询数据分析提供... 【查看详情】
-
 28 04包河区办公用短信服务推荐厂家
28 04包河区办公用短信服务推荐厂家这种业务的方便之处主要体现在它的即时通知功能,用户可通过网站、CallCenter申请 开通手续,建立起账户(对公账户或对私账户)与手机号的对应关系。消费者可根据自己个性化的要求,灵活设定多种短信条件,当账户资金变化满足条件时,金融系统可即时向用户手机发送短信,主要形式包括:超单笔发生额通知、超余额上下限通知、超累计发生额通知 等。 即时... 【查看详情】
-
 27 04肥东定做短信服务24小时服务
27 04肥东定做短信服务24小时服务新近推出的针对零售行业的短信业务,相信可以使经销商们一解燃眉之急。据介绍,有这样一个案例:一**品牌手机生产厂商,开办了多家手机直销店,现与移动部门合作建立 企业内部信息化平台。每家经销店每销售一台手机,就可通过发短信的方式,将该手机的零 售价格、机身串号、产品特征等信息发送回本部,由管理中心进行统计和核算,并及时制定 下一步价格战略。同... 【查看详情】
-
27 04肥西上门安装外呼系统销售价格
10.可以通过计算机有效地实现对通信链路灵活的呼叫管理和监控,包括呼叫转移、呼叫中止、智能呼出等服务11.客户服务中心可提供24小时服务,自动语音播报系统为客户提供全天候服务。智能选择座席 ACD自动呼叫分配系统(ACD)是客户服务中心有别于一般的热线电话系统的重要部分。在一个客户服务中心中,ACD成批处理来话呼叫,并将这些来话按指定的转... 【查看详情】
-
 27 04蜀山区本地外呼系统图片
27 04蜀山区本地外呼系统图片Internet客户服务中心所提供的是一项完整的、可靠的解决方案,使用的是基于行业标准和支持护航浏览的IP话音,文字交谈,电子邮件,和回叫的Internet功能。Internet客户服务中心的策略是将这些先进的技术和支持机制与业务功能、各项资源和目标相融合,创造出一个***完成任务的中心-它是现代前列水平的工具,可在任何媒体,任何地点,任... 【查看详情】
-
 27 04蚌埠上门安装短信服务推荐厂家
27 04蚌埠上门安装短信服务推荐厂家短信平台是基于通信网络和信息技术,为企业或个人提供批量短信发送、接收及管理服务的系统。它广泛应用于营销推广、身份验证、通知提醒、客户服务等场景,是连接用户与企业的重要数字化工具。短信群发平台是基于中国移动、中国联通、中国电信直接提供的短信端口与互联网连接实现与客户指定号码进行短信批量发送和自定义发送的,它分为软件单机版(带客户端)CS结构... 【查看详情】
-
 27 04巢湖本地短信服务销售电话
27 04巢湖本地短信服务销售电话短消息不可到达短消息不可到达的情况有三种:当被SMS网关查询时,移动台不在服务区域、未获得服务授权、或有未成功发送报文正等待告警,HLR就会立即知道不能发送;第二种情形是,MSC/VLR已收到报文但不能传送的情况。此时,它先向SMS网关发送一故障指示,作为MAP/H FORWARD SHORT MESSAGE报文的应答;然后,网关一方面会... 【查看详情】
