-
长宁区出口智能工厂解决方案调节
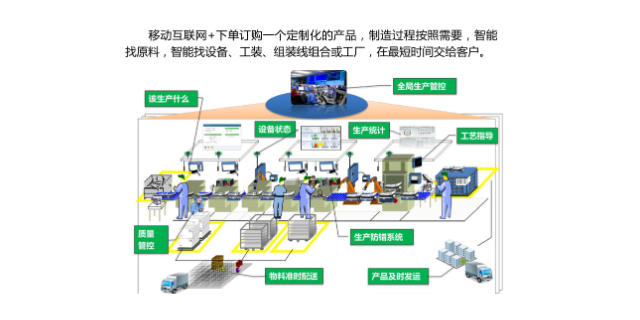
智能工厂是利用各种现代化的技术,在全椒海螺展开智能工厂示范项目建设,朗坤智慧科技股份有限公司全程参与智能工厂规划和建设,助力海螺水泥智能工厂的创新实践。实现工厂的办公、管理及生产自动化,达到加强及规范...
查看详细 -
松江区自制机器人检修

2023年,美国亚利桑那州立大学(ASU)科学家研制出了世界上个能像人类一样出汗、颤抖和呼吸的户外行走机器人模型。《隋书》里曾记载了一个机器人的故事:“……帝犹恨不能夜召,于是命匠刻木偶人,施机关,能...
查看详细 -
浦东新区质量自动化设备操作

自动化设备工程应用特点:1、工件在工位上的定位:根据需方产品的实际情况,轴向及圆周方向均以某一管接的孔(或管接头)作为基准。2、工件的上下料(上下线)采用人工模式,附件的上料为人工理料、自动上料。3、...
查看详细 -
金山区威力智能工厂解决方案操作
4、安全和可持续性智能工厂还可以为劳动保健和环境可持续性带来真正的好处。更大的流程自主性可以减少人为错误的可能性,包括造成伤害的事故。利用物联网技术实现设备间高效的信息互联,数字工厂向“物联工厂”升级...
查看详细 -
静安区贸易机器人设置
2021年,据《科技日报》报道,美国的研究团队创造了一种有史以来可以自我繁殖的异形机器人(Xenobots 3.0),《美国国家科学院院刊》发表了这一研究结果。2022年4月,中国科学院沈阳自动化研究...
查看详细 -
长宁区进口智能工厂解决方案价目
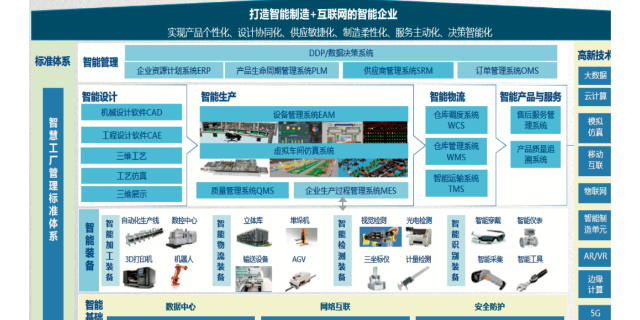
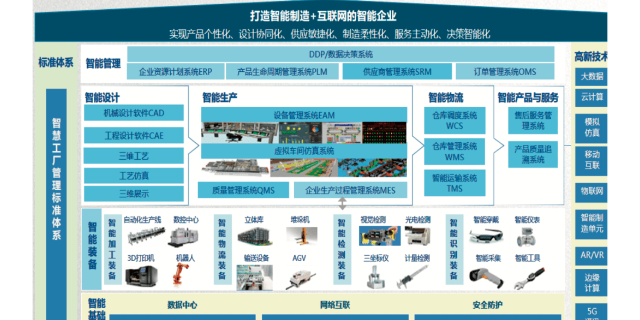
“智能工厂”的发展,是智能工业发展的新方向。但并不是所有智能工厂都能被称为智能工厂,如何判断这个工厂是否是智能工厂?我们可以从以下五个特性入手:1、系统具有自主能力:可采集与理解外界及自身的资讯,并以...
查看详细 -
长宁区进口自动化设备设置

自动化是专门从事智能自动控制、数字化、网络化控制器及传感器的研发、生产、销售的高科技公司,其众多的功能模块、完善的嵌入式解决方案可程度地满足众多用户的个性化需求。公司的产品拥有多种系列的产品来满足客户...
查看详细 -
崇明区通用机器人操作

这种机器人的外形轮廓与数控镗铣床或三坐标测量机相似,如图1-1所示。3个关节都是移动关节,关节轴线相互垂直,相当于笛卡儿坐标系的x、y和z轴。它主要用于生产设备的上下料,也可用于高精度的装卸和检测作业...
查看详细 -
奉贤区综合智能工厂解决方案特点
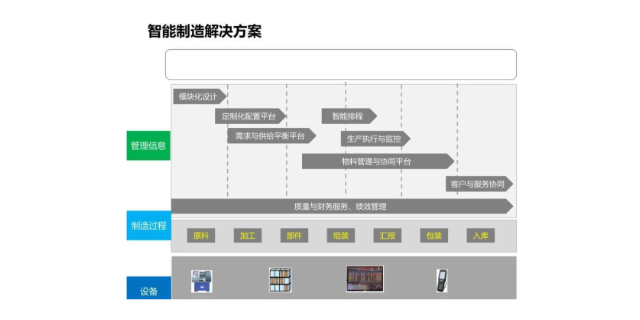
未来智能化工厂的发展方向主要有以下几个方面:智能化工厂将会更加智能化和自动化,机器人将会更加智能化和灵活化。智能化工厂将会更加数字化和信息化,大数据分析技术将会更加成熟和普及。智能化工厂将会更加生态化...
查看详细 -
杨浦区贸易智能工厂解决方案特点
在未来工厂,每个生产环节清晰可见、高度透明:信息和生产组成了一个密切相关的网络。整个车间悄然高效地运转,智能机器不仅彼此协作,还与遍布全球的员工、顾客和客户以及智能分析动态系统进行协作,它们分布在整...
查看详细 -
徐汇区综合自动化设备设置

②作用单元。施加能量和定位。③传感单元。检测过程的性能和状态。④制定单元。对传感单元送来的信息进行比较,制定和发出指令信号。⑤控制单元。进行制定并调节作用单元的机构。自动化的研究内容主要有自动控制和信...
查看详细 -
闵行区国产智能工厂解决方案操作
目前传统工业与互联网企业均想推进工业物联网的发展进程,但两者各有弊端:传统工业不熟悉软件开发,互联网企业缺乏对工艺的了解,不熟悉生产流程及规范,如何让两者快速联手,进军智能工厂,是当务之急。技术性问题...
查看详细