格物斯坦传感器的优势在于工业精度与教育易用性的统一:微米级硬件适配:传感器接口与铝合金结构件采用0.01mm公差设计,确保超声探头、红外发射器等模块的安装稳定性,抗冲击性较塑料件提升300%,支持千次拆装无损耗;全栈式信号处理:内置放大滤波电路(如应变式称重传感器的惠斯通电桥),直接输出校准后数字信号,学生无需额外搭建电路即可通过I²C/UART读取数据,降低电子工程门槛;跨平台编程融合:在图形化软件GScratch中,传感器数据被封装为“环境光强度”“障碍物距离”等积木块,支持拖拽式逻辑设计;高阶开发者则可调用ROS驱动包(如OpenCV视觉库),实现Python/C++原生控制。移动端App实现遥控、语音控制及“你画我跑”等交互玩法。难度适中的开源结构件
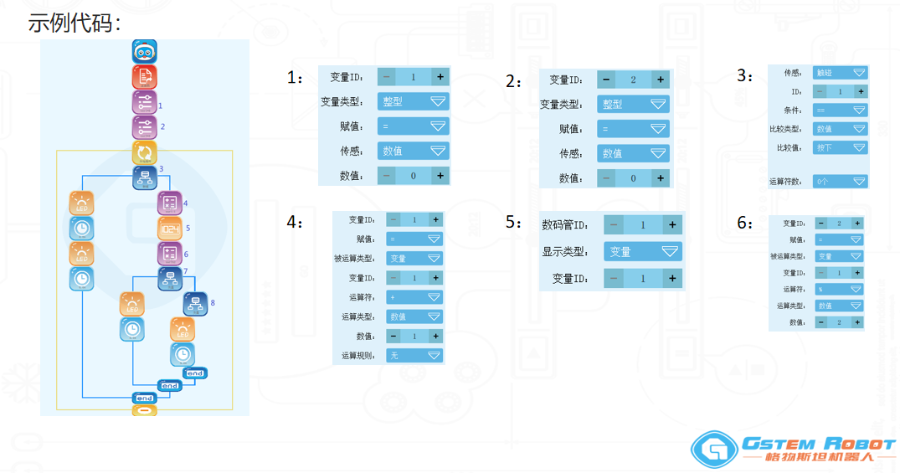
开源(Open Source)是一种软件开发和协作模式,其在于开放源代码,允许任何人查看、修改、分发和使用软件代码。它不仅是技术实践,更是一种开放共享的创新哲学,深刻影响着全球技术生态和产业发展。以下是开源的内涵与延伸意义:开源软件需遵循特定许可证(如GPL、Apache等),将程序源代码完全公开。用户可自由访问、研究、修改代码,甚至基于原代码开发新软件。源需满足严格条件,包括自由再发行、允许派生程序、不歧视个人或领域、禁止技术垄断等。例如,GPL许可证要求修改后的衍生版本也必须开源,防止代码被私有化控制。难度适中的开源结构件图形化编程卡开源指令集,将抽象代码转化为可触摸步骤。
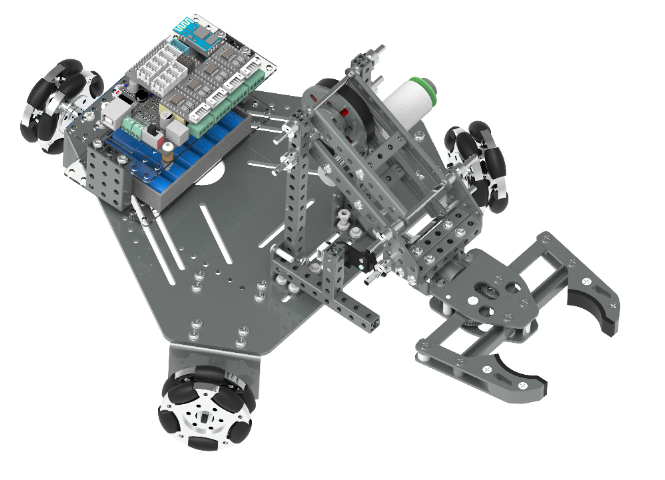
格物斯坦机械手臂的**价值在于打通“学习-创造-应用”闭环:教学场景:在K12阶段,学生通过搭建机械臂模型学习齿轮传动、杠杆原理等工程知识;高中生则开发“智能分拣系统”,结合OpenCV识别不同颜色与形状的物体。在高校科研中,上海大学与清华大学联合实验室利用该平台研究具身智能算法,例如优化双足机器人Tinker的关节控制策略。竞赛与社会议题:机械手臂成为解决真实问题的工具。如山区学生设计“智能浇花系统”,通过土壤湿度传感器触发机械臂灌溉指令;IRM大赛获奖项目“林火监测无人机”则整合红外传感器与机械臂,实现火源定位误差小于2米。产业赋能:平台的开源特性降低企业研发成本。传统需500万元投入的机械臂原型开发,现可单人5天内完成;优必选、宇树科技等企业基于其硬件架构开发出教育与工业场景产品,例如9.9万元级家用服务机器人已投入养老医疗领域。
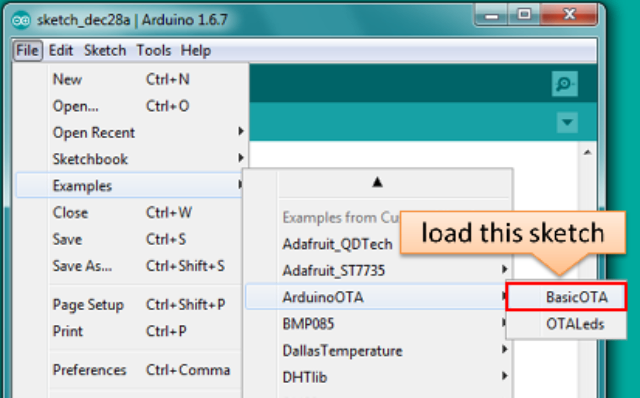
开源课程的优势在于 “产学研赛一体化”生态:工具链贯通:从图形化编程(GScratch)到工业级开发(ROS/Arduino),学生可在“格物”仿真平台预演算法(如抗强风机械臂运动策略),再部署至实体硬件验证,压缩研发周期;场景化创新:课程嵌入真实社会议题,如山区学生开发“智能浇花系统”,通过土壤湿度传感器触发机械臂灌溉指令,或参与IRM国际机器人创客大赛,设计火源定位误差小于2米的林火监测无人机;开源社区协作:OpenLoong平台共享3D模型与代码库(如“全自动象棋机器人”方案),学生可复用成熟模块聚焦功能优化,而企业如优必选、宇树科技亦基于其硬件架构二次开发,将传统需500万元投入的机械臂原型压缩至单人5天完成。山区学生用开源土壤湿度传感器开发智能灌溉机器人。
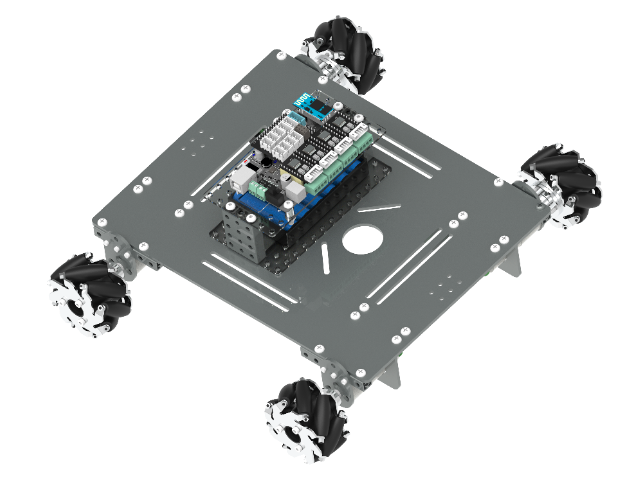
格物斯坦GBOT系列初级甲虫机器人采用基础履带式移动平台,结构紧凑易组装。通过ATmega328P主板控制电机驱动,学习基础运动逻辑。该机器人支持Scratch图形化编程快速入门,或Arduino代码深入开发,适合机器人结构认知与动作控制教学。而中级的投石车的设计模拟了古代利用杠杆原理抛射石弹的大型人力远射兵器。采用电机配合减速齿轮组驱动投臂,精确控制抛射力度与角度。使用TT马达电机实现稳定动力输出,根据编程内容的编写调节投射轨迹。高龄段课程深度兼容ROS,调用OpenCV视觉库开发工业级算法。金属开源巡线
全金属模块化设计,兼容Scratch、Arduino及ROS生态,扩展性强大。难度适中的开源结构件
这些开源项目不仅需掌握多自由度机械结构设计,更需贯通机械动力学、传感融合与AI算法,将创客想法转化为可部署的工业级原型,为科研或职业发展铺路。全周期教育理念的深层逻辑格物斯坦的年龄分层背后是“具象→抽象→创造”的认知跃迁路径:幼儿通过物理交互建立逻辑原点,儿童在图形化编程中理解系统关联,青少年则借工业级工具实现自主创新。这一路径与中国青少年智力发展特征深度咬合——例如山区学生通过土壤湿度传感与机械臂开发农业机器人,城市高中生用脑机接口模块为特殊儿童设计康复工具——让技术普惠成为创造力民主化的引擎。随着“格物”具身智能平台的拓展,该开源生态将持续降低高阶机器人开发门槛,让每个年龄段的探索者都能成为未来智能社会的构建者。难度适中的开源结构件