格物斯坦机械手臂采用**度铝合金结构件,通过超精密加工技术实现0.01毫米公差精度,确保机械臂在高速运动中的稳定性和耐久性。其关节模块搭载高扭矩舵机(扭矩范围0.15-20kg·cm),支持多自由度运动(如六轴协同),并预留标准化接口(I²C、UART、GPIO),兼容超声测距、红外巡线、温湿度传感器等300余种电子模块,以及第三方执行器如气动机械爪。**控制器GC-500/GC-600系列集成蓝牙4.0模块,支持手机App遥控(如“你画我跑”轨迹生成、语音指令交互),同时深度兼容ROS(Robot Operating System)开发套件。这一设计使学生可直接调用ROS中的运动控制API、传感器驱动库及OpenCV视觉算法,用Python/C++编写自主导航程序,实现从仿真到实体硬件的无缝迁移。社区创客空间标配格物斯坦开源套件,鼓励民间创新。兼容各种开源系列产品

格物斯坦与上海大学、清华大学共建“清华-上大机器艺术与具身智能实验室”,由上海大学副教授叶林奇领衔,聚焦具身智能、机器人运动控制与仿真技术的前沿研究。该实验室开发的“格物”具身智能仿真平台成为标志性成果——通过集成通用强化学习框架与模型自动化适配技术,实现“一套代码适配百余款机器人”,新机型导入即可训练,无需重复编程,彻底颠覆传统研发流程。复旦大学亦深度参与技术验证,其自主研制的“光华一号”人形机器人依托该平台优化运动算法,将行走、抓取等功能的开发周期从3个月压缩至数天。此外,平台与UnityRLPlayground开源框架的融合,进一步降低了开发门槛,支持从仿真训练到实体部署的全流程自动化。适合中龄段学习的开源小车创客教育开源范式:工业级精度支撑教育级容错。
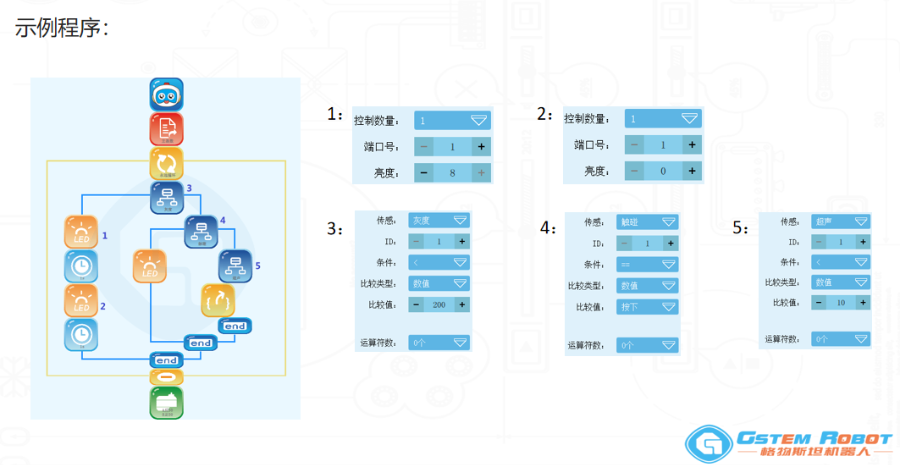
开源这些控制器的优势在于教育适配性与技术开放性的统一:认知分层设计:从点读笔的物理交互到ROS的代码开发,形成“无屏→实体卡→图形化→代码化”的渐进路径,匹配儿童思维从具象到抽象的发展规律;软硬件深度协同:以GC-500为例,其内置的GScratch软件基于Scratch 2.0深度优化,新增硬件交互模块脚本,学生拖拽“超声避障”“舵机角度”等积木即可控制机器人行为,同时支持图形代码一键转译为Arduino C语言,实现从趣味编程到工程开发的无缝跃迁;工业级扩展能力:GC-600控制器提供I²C、UART、GPIO等标准接口,可驱动多自由度仿生关节(如12自由度仿生犬),并兼容第三方传感器与执行器,使中学生能开发“林火监测无人机”“脑电波控制机械臂”等复杂项目,将创客想法快速转化为工业级原型;跨平台生态整合:控制器适配格物斯坦的六面拼搭金属结构件(公差精度0.01mm),结合开源社区共享的3D模型与代码库,学生可复用“全自动象棋机器人”等成熟方案,聚焦创新优化而非重复造轮,真正践行“创造无围墙”的理念。
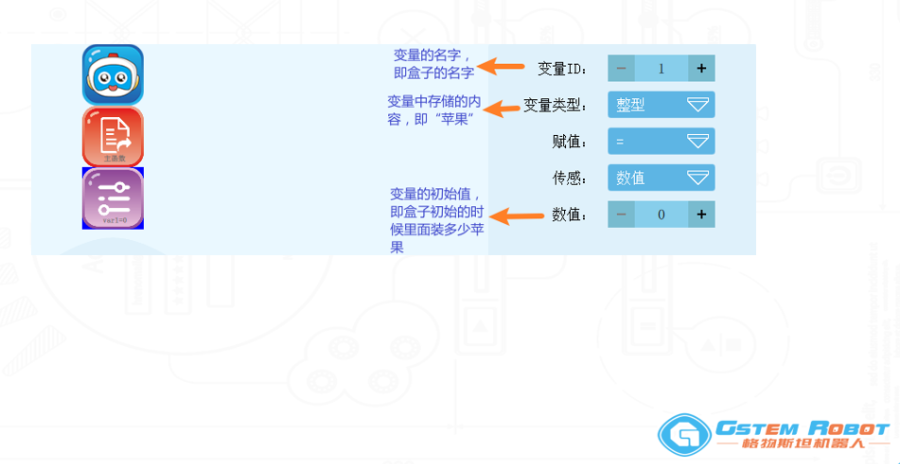
格物斯坦自主研发的这套开源系列课程是其根据中国本土化stem教育生态中面向10岁以上青少年的更高阶实践平台,深度融合工业级硬件与开源软件生态,通过“机械结构+电子电路+算法编程”的三维整合,构建了从机械和编程的基础认知到对其创新研发的完整路径。该系列课程以高精度的金属结构件(0.01毫米公差精度)与专门研发的开源控制器(如GC-500/GC-600)为很重要的载体,结合分层级编程工具链,精确适配不同年龄段学生的认知发展与创新能力需求。图形化编程卡开源指令集,将抽象代码转化为可触摸步骤。
格物斯坦开源系列课程在低龄段(10-13岁) 以 Gbot机器人课程 为起点,学生通过36课时的项目实践,从Scratch图形化编程切入硬件交互。例如,在“螳螂机器人”项目中,学生需设计多关节机械结构,结合巡线传感器与超声模块实现动态避障;而“智能伸缩门”项目则要求学生运用限位开关与蓝牙模块,调试电机扭矩与齿轮传动系统,理解物理信号到数字指令的转换逻辑。课程同步引入 GScratch软件,支持图形化指令一键转译为Arduino C代码,为高阶开发架设桥梁。开放工厂参观,学生实地体验智能制造流程。推动开源巡线
山区学生用开源土壤湿度传感器开发智能灌溉机器人。兼容各种开源系列产品
开源课程中高龄段(13-16岁) 则进阶至 开源金属十合一课程 与 Arduino金属开源机器人课程。前者分初、中、高三级(共36课时),聚焦工程系统设计:学生以Arduino开发板为主控,学习C/C++语法与数据结构,通过曲柄连杆机构、蜗杆传动等机械原理,完成“颜色分类系统”“柔性制造流水线”等工业级原型开发,并掌握万用表、示波器等工具的使用。后者则深入仿生学与人工智能领域——例如设计“仿生蜘蛛”时需协调12自由度舵机运动,调用陀螺仪数据实现动态平衡;而“人形机器人”项目结合OpenCV视觉库与YOLO目标检测算法,实现物体抓取的毫米级精度控制。兼容各种开源系列产品