
实现“看的远、看的细,测的快、测的准”的风场观测是对测风激光雷达的重要挑战。为了获取3米和0.1秒时空分辨率的风场,需再提高现有激光雷达信号检测灵敏度2个数量级以上。团队通过在激光光源、光学收发系统、高速数据采集电路和数据处理算法上对激光雷达进行了优化,并在时频分析、脉冲编码基础上提出一种新的反演算...
激光雷达基本参数
- 品牌
- 慧视科技
- 型号
- 可定制
激光雷达企业商机
对于城市发展而言,激光雷达还能够帮助我们进行更有利的选址。项目选址是一项重要的工作,地形就是其中首要考虑的因素之一,这直接决定了项目的安全以及未来运行的效果。因此,在进行选址时,利用激光雷达 对公园和旅游区进行规划。高精度的地表模型有助于找到相对适合游乐场、树木和步行道的区域。公园管理是一个规划较大的项目,激光雷达技术的运用对其管理起着至关重要的作用。利用激光雷达技术生成的公园 3D 图像有助于公园未来的发展。此时激光雷达所测到的这两种波长光信号衰减差是待测对象的吸收所致。贵阳16线激光雷达结构
激光雷达
目前也有一些用其他传感器取代激光雷达的设想。例如4D成像雷达(毫米波)正是被不少人看作有望取代激光雷达的传感器之一。它与普通毫米波雷达相比,探测范围变大、距离变远,且能提供俯仰角的数据。但与激光雷达相比,在点云密度、探测距离等方面,仍然大幅落后于激光雷达。除了在性能上的差距外,还有一点不容忽略。从商业化角度来说,激光雷达目前已经开始落地,消费者对于激光雷达的重要性也产生了一定的认知,特别是在乘用车领域来说,主机厂没有耐心继续等待其他传感器的发展,占得先机的激光雷达相比于其他还未能落地的产品来说将会拥有更多资金用于研发,以提升产品能力。西藏sick激光雷达技术慧视光电推出雷视一体机!

对车载激光雷达的评价通常涉及到性能、可靠性以及应用等方面。需要关心的参数有很多,包括:激光波长、探测距离、视场角(垂直+水平)、测距精度、角分辨率、出点数、线束、安全等级、输出参数、防护等级、功率、供电电压、激光发射方式、使用寿命等。但激光雷达功能上是一种距离测试系统,其主要性能应围绕测试的速度、测试的空间范围、测试分辨率、测试的准确度、测试的重复度几方面来评价。依据这个原则,通常认为激光雷达的主要性能参数有帧频、max探测距离和min探测距离、视场角、距离分辨率、水平角分辨率、垂直角分辨率、点频以及测距精度和测距准确度。
相比摄像头,激光雷达是一种比较原始的控制方式,其原理和家里的扫地机是一样的,就是根据周边的障碍物和地图控制车辆行驶方向和速度。激光雷达可每秒向外发射几百万个激光脉冲并通过内部旋转方式对外界进行旋转扫描。每次扫描都可获取周边物体精确的三维数据。将收集的数据上传并分析处理,然后得出结果。这种方法的缺点就是算法是固的,完全依赖硬件性能,不能通过自我学习提升,不能识别红绿灯和限速牌,无法实现更高级别的自动驾驶。这种应该叫辅助驾驶,并不是真正意义上的自动驾驶。慧视光电推出周界型雷视融合设备。

随着我国经济的飞速发展,工业化水平逐渐提高,环境的污染问题也逐渐地被大家所重视起来。随着人们生活水平的不断提高,人们对于环境的要求也逐渐提升,环境污染的治理以及环境工程已经成为当下必不可少的工作。在进行社会和自然环境评价时,我们可以有效利用三维激光雷达数据生成的微地形数据可用于环境评价。环境评估是为了保护植物和环境而进行的。遥感与地表信息 可用于寻找受人类活动影响的区域。成都慧视研发的三维激光雷达能够快速输出3D信息,能够进行高效的户外环境探测。成都慧视光电的雷视一体机是怎么样的?西藏sick激光雷达扫描仪
成都慧视光电推出的雷视一体机可应用于车路协同。贵阳16线激光雷达结构
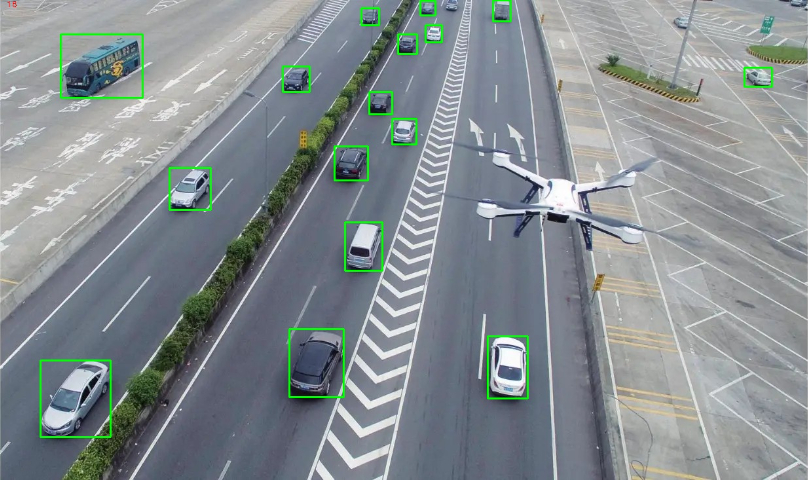
通过对外发射激光,在遇到物体后,激光折射回来被传感器接收,从而测得本体到障碍物的距离。根据激光雷达的原理,只需要知道光速、和从发射到感知的时间就可以测算障碍物的距离,若应用于车辆上就可以得到前方物体的坐标方位和距离信息。通过摄像头、雷达等传感器识别外界信息,就好像人的眼睛和耳朵,同时依托车侧与路侧感知全要素数据及人工智能算法,引入交通信息数据,并与高精度地图数据融合,为自动驾驶协同决策提供能力基础。贵阳16线激光雷达结构
成都慧视光电技术有限公司目前已成为一家集产品研发、生产、销售相结合的贸易型企业。公司成立于2019-08-26,自成立以来一直秉承自我研发与技术引进相结合的科技发展战略。公司主要经营电子元器件,光电子器件,通讯设备,仪器仪表等,我们始终坚持以可靠的产品质量,良好的服务理念,优惠的服务价格诚信和让利于客户,坚持用自己的服务去打动客户。慧视科技以符合行业标准的产品质量为目标,并始终如一地坚守这一原则,正是这种高标准的自我要求,产品获得市场及消费者的高度认可。成都慧视光电技术有限公司本着先做人,后做事,诚信为本的态度,立志于为客户提供电子元器件,光电子器件,通讯设备,仪器仪表行业解决方案,节省客户成本。欢迎新老客户来电咨询。
与激光雷达相关的文章

西藏毫米波激光激光雷达测距
- 成都固态面阵激光雷达扫描 2024-04-19
- 重庆三位测绘激光雷达生产商 2024-04-18
- 成都32线激光雷达测绘 2024-04-18
- 昆明多线激光雷达电子狗 2024-04-18
- 四川面阵激光雷达应用 2024-04-18
- 西藏汽车激光雷达企业 2024-04-18
- 西藏固态面阵激光雷达商家 2024-04-17
- 云南sick激光雷达企业 2024-04-17
- 成都ibeo激光雷达点云 2024-04-17
- ip67防水激光雷达传感器 2024-04-17
- 成都32线激光雷达结构 2024-04-16
- 云南三位测绘激光雷达测距 2024-04-15
与激光雷达相关的产品


与激光雷达相关的新闻
-
贵州905nm激光雷达数据 2024-04-14 18:01:46一般情况下,城市绿化的普及调查需要五年进行一次,收集城市林木、林地和城市绿地资源的种类、数量、质量与分布的数据,客观反映调查区域自然、社会经济条件和管理状况,为决策者提供数据支撑。激光雷达技术可以获取高精度遥感数据,能够进一步分析处理得到城市绿化中每棵树的位置、高度、胸径、冠幅,可以减少人工调查工作...
-
汽车激光雷达成像 2024-04-14 00:12:56将单站扫描扩展为整体扫描,将地表上的点、线、面体、地表三维模型等几何数据快速重构出来,可对调查对象的整体变化、细节特征进行详细了解。这种从多方位、多角度地对所测物体进行数据采集获取更多三维信息,建立的三维可视化数据能够更加真实地反映地理位置、外观、高度等属性特征。成都慧视光电技术有限公司研发的HSL...
-
四川三维激光雷达批发 2024-04-14 20:01:50在采矿车运输场景中,此种方法原理类似,也能达到安全运输管理的目的。成都慧视自研的三维激光雷达HSLi-H20是专为轨道交通监控自主研发的一款激光雷达。具有探测范围宽、分辨率高、响应速度快、点云密集、环境耐受性高等杰出优点,摆脱了现有市场上探测分辨率、扫描速度等技术参数不满足实际需求指标、性价比不高等...
-
贵州三维激光雷达扫描 2024-04-14 14:01:46此外,在运输机器人的工作中,例如送餐机器人,激光雷达能够通过不间断的光束扫描获取前方的路况信息,然后根据算法制定行进路线,避开障碍物。物体测量领域,激光雷达能够通过扫描获取物体的三维信息,从而计算出体积、重量等数据。在大多数高速入口,都会对进入高速的货车等进行称重,此时,激光雷达就有大用场,将激光雷...
与激光雷达相关的问题
新闻资讯
产品推荐
-
广西快速图像标注多少钱
2026-07-04 -

广东快速图像处理板
2026-07-04 -

河南目标跟踪应用
2026-07-04 -

黑龙江企业目标识别控制软件
2026-07-04 -

天津移动目标识别软件
2026-07-04 -
甘肃哪里有图像标注
2026-07-04 -
青海图像处理板产品
2026-07-04 -
质量图像处理板检测
2026-07-04 -
海南高性能目标识别定制
2026-07-04