-
虹口区进口智能工厂解决方案操作
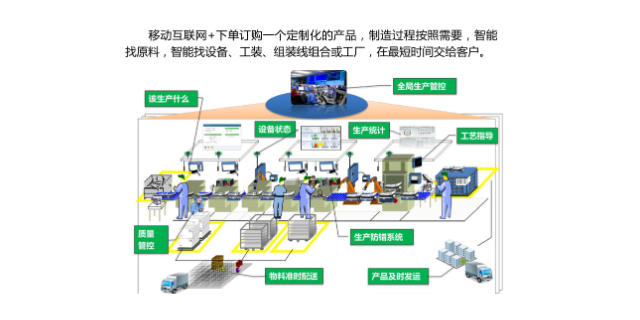
通过二维码、射频识别、软件、网络等信息技术集成原材料、零部件、能源、设备等各种制造资源。由小到大实现从智能装备/产品到智能生产单元、智能生产线、数字化车间、智能工厂,乃至智能制造系统的集成。33、互联...
查看详细 -
宝山区综合自动化设备风格

自动化设备工程应用特点:1、工件在工位上的定位:根据需方产品的实际情况,轴向及圆周方向均以某一管接的孔(或管接头)作为基准。2、工件的上下料(上下线)采用人工模式,附件的上料为人工理料、自动上料。3、...
查看详细 -
金山区出口机器人推广

a.结构简单,直观,刚度高。多做成大型龙门式或框架式机器人。b. 3个关节的运动相互独立,没有耦合,运动学求解简单,不产生奇异状态。采用直线滚动导轨后,速度和定位精度高。c.工件的装卸、夹具的安装等受...
查看详细 -
崇明区质量智能工厂解决方案经历
而OT则是以IOT的手段进行数据自动采集与质量管控,比如生产模具在其全生命周期过程中总计只能应用10000次,而通过IOT可以远程采集模具的应用次数,当达到10000次之后自动报警从而进行质量管理;通...
查看详细 -
徐汇区国产智能工厂解决方案设置
4、安全和可持续性智能工厂还可以为劳动保健和环境可持续性带来真正的好处。更大的流程自主性可以减少人为错误的可能性,包括造成伤害的事故。利用物联网技术实现设备间高效的信息互联,数字工厂向“物联工厂”升级...
查看详细 -
松江区品牌自动化设备防水

5.2 实验室设备实验室设备是自动化教育和培训中不可或缺的一部分。学生可以使用自动化实验设备来进行实际操作和实验,深入了解自动化设备的工作原理和应用。这些实验设备可以帮助学生培养实践能力和创新思维,为...
查看详细 -
宝山区威力机器人风格

③在工作节拍短、动作多的情况下,常使几个动作同时进行。为此,驱动系统要采取相应的措施,以保证动作的同步。医疗行业在医疗行业中,许多疾病都不能只靠口服外敷药物,只有将药物直接作用于病灶上或是切除病灶才能...
查看详细 -
静安区威力机器人特点

随着人们对机器人技术智能化本质认识的加深,机器人技术开始源源不断地向人类活动的各个领域渗透。结合这些领域的应用特点,人们发展了各式各样的具有感知、决策、行动和交互能力的特种机器人和各种智能机器人。机器...
查看详细 -
黄浦区品牌自动化设备设置
自动化的对象变为大规模、复杂的工程和非工程系统,涉及许多用现代控制理论难以解决的问题。这些问题的研究,促进了自动化的理论、方法和手段的革新,于是出现了大系统的系统控制和复杂系统的智能控制,出现了综合利...
查看详细 -
宝山区贸易机器人防水
PUMA562型机器人具有6自由度,可以进行复杂空间曲面的弧焊作业。从运动学的观点看,在完成某一特定作业时具有多余自由度的机器人,就叫作冗余自由度机器人,亦可简称冗余度机器人。例如PUMA562机器人...
查看详细 -
虹口区威力机器人特点

控制方式①操作型机器人:能自动控制,可重复编程,多功能,有几个自由度,可固定或运动,用于相关自动化系统中。 [3]②程控型机器人:按预先要求的顺序及条件,依次控制机器人的机械动作。 [3]③示教再现型...
查看详细 -
浦东新区贸易机器人操作
机器人或机械手各动作的最大行程确定之后,可根据生产需要的工作节拍分配每个动作的时间,进而确定各动作的运动速度。如一个机器人操作臂要完成某一工件的上料过程,需完成夹紧工件,手臂升降、伸缩、回转等一系列动...
查看详细