-
宝山区品牌机器人价目

机器人(Robot)是一种能够半自主或全自主工作的智能机器。机器人能够通过编程和自动控制来执行诸如作业或移动等任务。历史上早的机器人见于隋炀帝命工匠按照柳抃形象所营造的木偶机器人,施有机关,有坐、起、...
查看详细 -
嘉定区贸易机器人设置
工艺过程的不同,对机器人操作臂重复定位精度的要求也不同。不同工艺过程所要求的定位精度见表2-1。 [3]表2-1 不同工艺过程的定位精度要求当机器人操作臂达到所要求的定位精度有困难时,可采用辅助工夹具...
查看详细 -
金山区自制智能工厂解决方案操作
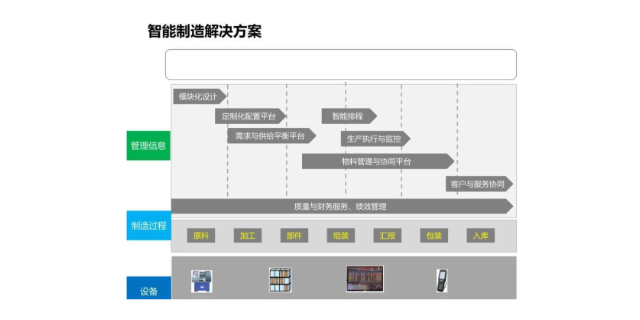
未来的智能工厂建设仍然会在IT、OT、AI与企业模型数据等方面攻城拔寨,比如之前的IT基本上是以记录为心,大部分的IT系统的数据都是来源于手工记录,比如MES系统,大部分数据来源于现场的报工数据,但是...
查看详细 -
崇明区综合机器人防水

按照机器人的移动方式来分类 [3],可分为轮式移动机器人、步行移动机器人(单腿式、双腿式和多腿式)、履带式移动机器人、爬行机器人、蠕动式机器人和游动式机器人等类型。 [3]作业空间按照机器人的作业空间...
查看详细 -
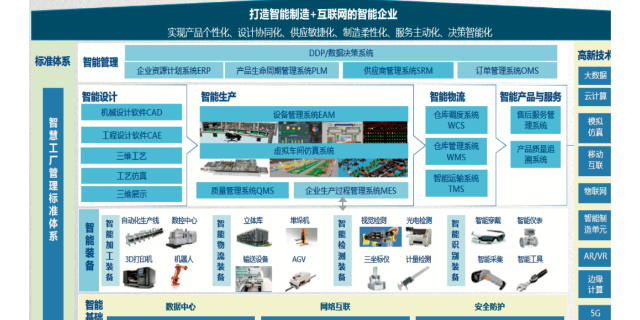
金山区进口智能工厂解决方案推广
智能工厂针对一个企业进行优化升级,而工业互联网的概念:是新一代信息通信技术与工业经济深度融合的新型基础设施、应用模式和工业生态,通过对人、机、物、系统等的连接,构建起覆盖全产业链、全价值链的全新制造和...
查看详细 -
松江区进口自动化设备风格

首先,不要肯定是控制器毁坏,只要没有出现过严重的短路,控制器内部都具有短路保护,一般性的短路不会烧毁控制器。首先,检查是否有高频干扰的设备在控制器附近。如果有,立刻挪走。如果在户外,大强度的闪电也可能...
查看详细 -
闵行区贸易自动化设备防水

工厂或事业单位的人、财、物、生产、办公等业务管理自动化,是以信息处理为的综合性技术,涉及电子计算机、通信系统与控制等学科。一般采用由多台具有高速处理大量信息能力的计算机和各种终端组成的局部网络。现代已...
查看详细 -
黄浦区综合自动化设备风格

4.3 自动化能源生产设备自动化设备在能源生产领域也起着重要作用。这包括自动化电厂控制系统、风力发电机和太阳能跟踪系统。自动化电厂控制系统可以优化能源的产生和分配,提高电力系统的稳定性和效率。风力发电...
查看详细 -
崇明区品牌机器人推广

感觉型机器人。示教再现型机器人对于外界的环境没有感知,这个操作力的大小,这个工件存在不存在,焊接的好与坏,它并不知道,因此,在20世纪70年代后期,人们开始研究第二代机器人,叫感觉型机器人,这种机器人...
查看详细 -
崇明区进口机器人防水

2021年,据《科技日报》报道,美国的研究团队创造了一种有史以来可以自我繁殖的异形机器人(Xenobots 3.0),《美国国家科学院院刊》发表了这一研究结果。2022年4月,中国科学院沈阳自动化研究...
查看详细 -
黄浦区进口智能工厂解决方案防水
目前传统工业与互联网企业均想推进工业物联网的发展进程,但两者各有弊端:传统工业不熟悉软件开发,互联网企业缺乏对工艺的了解,不熟悉生产流程及规范,如何让两者快速联手,进军智能工厂,是当务之急。技术性问题...
查看详细 -
普陀区贸易机器人特点
其中,r是手臂的径向长度,θ是手臂绕水平轴的角位移,z是在垂直轴上的高度。如果r不变,操作臂的运动将形成一个圆柱表面,空间定位比较直观。操作臂收回后,其后端可能与工作空间内的其他物体相碰,移动关节不易...
查看详细