陕西某地村落一老人被闯入的野猪冲撞撕咬致死,让动物入侵居民区的话题再次登上热搜。此类野生动物在野生动物保护法的保护下,生存环境得到了极大改善,像野猪由于繁殖能力强、适应能力强,已在我国28个省份广分布,已经不再属于濒危动物系列。并且,由于数量过高,有多大26个省份的居民受到了安全威胁。因此各地也在积...
目标跟踪基本参数
- 品牌
- 慧视科技
- 型号
- 可咨询
- 输出信号
- 数字型,定制
- 制作工艺
- 集成,薄膜,陶瓷,可定制
- 材质
- 可定制
- 材料物理性质
- 导体,磁性材料,定制
- 材料晶体结构
- 定制
- 加工定制
- 是
目标跟踪企业商机
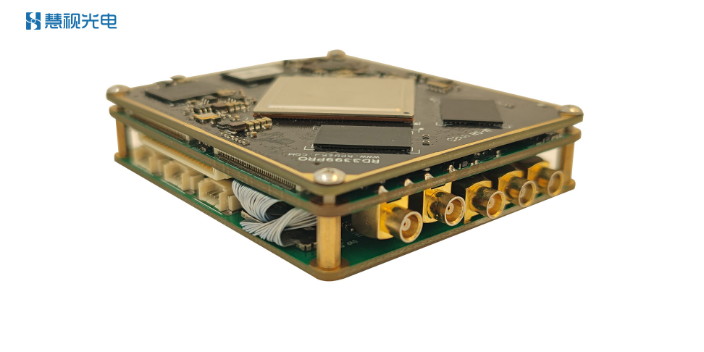
无人机只需要从基地起飞,就能够对指定区域进行巡检,智能摄像头能够自动问诊地面,识别护栏错位、路面积水、凹陷、裂缝、交通事故、车流异常等问题,然后标记位置。而控制中心能够实时查看前方画面,接收无人机回传的数据,并进行诊断分析,整个过程无需过多的人工干预。这种无人机智能问诊,是通过向无人机植入高性能的AI图像处理板以及定制专门的目标识别算法来实现的。成都慧视开发的Viztra-LE026图像处理板,就非常适合用在无人机智能化领域。这块板卡外形呈圆形设计,尺寸为ф38*12mm,功率不超过4W,整体呈现功耗低、尺寸小的特点。用在紧凑型的无人机当中也不会因为空间问题而苦恼,并且不会过多消耗无人机的续航。此外,Viztra-LE026这款图像处理板采用的是RV1126芯片,2.0TOPS的算力用在路面识别领域十分合适。RV1126图像处理板的目标识别能力突出。流畅目标跟踪诚信推荐
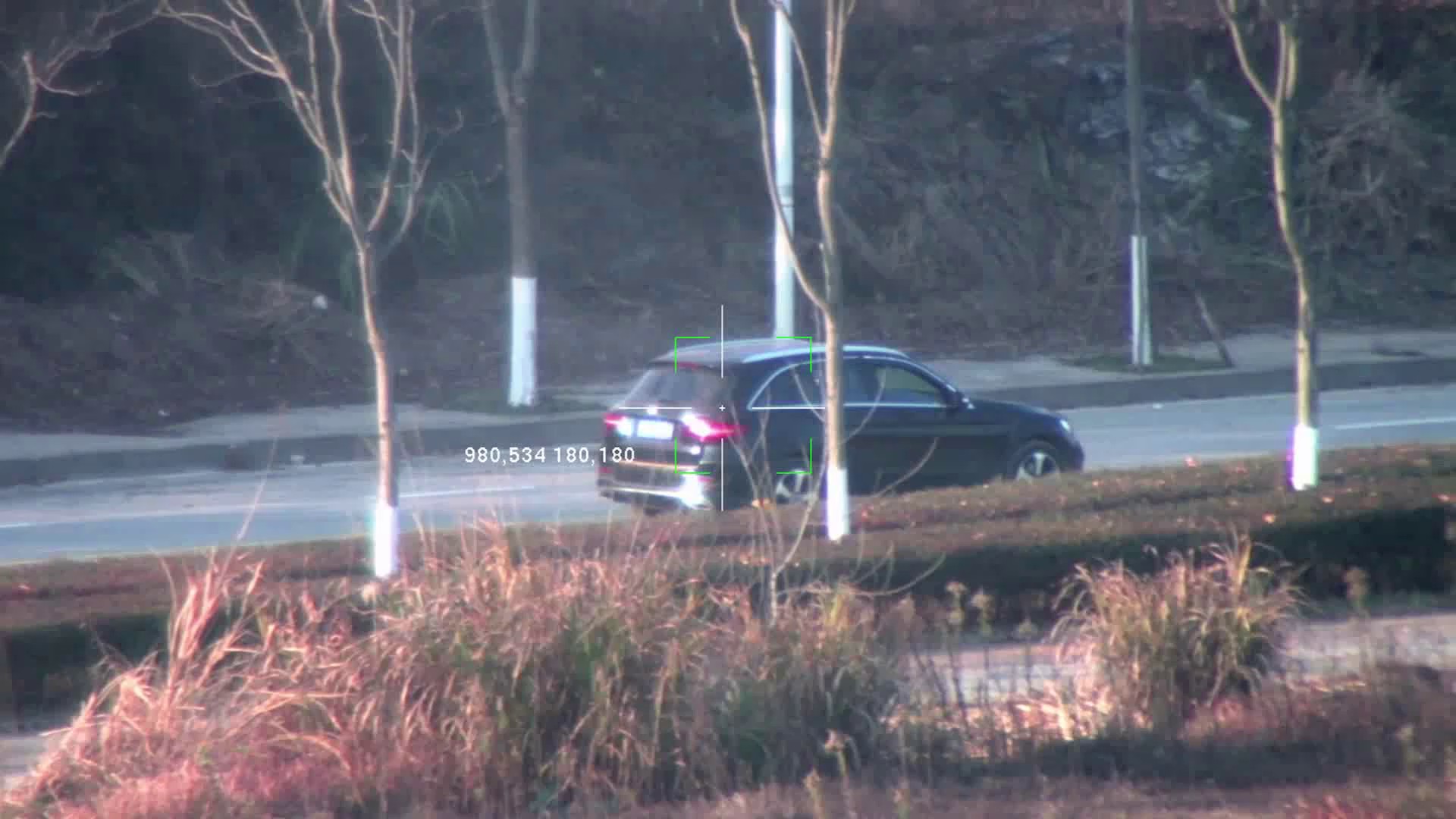
目标跟踪
序列图像的差异通常是运动目标检测和跟踪的出发点,认为目标的运动是图像差异的根本原因。但是,这是建立在背景本身不运动的前提下的。因此,在许多跟踪系统中,比如车载,由于车的振动导致传感器位置的变化,表现在图像上就是背景的运动,因此在做差图像和背景自动更新之前,都必须先经过配准,即让所有图像在都同一个坐标系之下,以消除背景的运动。在不同的应用场合,配准的方法多种多样,比如当两个图像之间只有平移变化时,计算出它们的平移量即可实现配准;由于平移变化对图像的相位信息影响较大,在频率域利用相位相关可以实现配准。江西哪里有目标跟踪慧视微型双光吊舱非常适用于无人机领域。

相关滤波的跟踪算法始于2012年P.Martins提出的CSK方法,作者提出了一种基于循环矩阵的核跟踪方法,并且从数学上完美解决了密集采样(Dense Sampling)的问题,利用傅立叶变换快速实现了检测的过程。在训练分类器时,一般认为离目标位置较近的是正样本,而离目标较远的认为是负样本。回顾前面提到的TLD或Struck,他们都会在每一帧中随机地挑选一些块进行训练,学习到的特征是这些随机子窗口的特征,而CSK作者设计了一个密集采样的框架,能够学习到一个区域内所有图像块的特征。
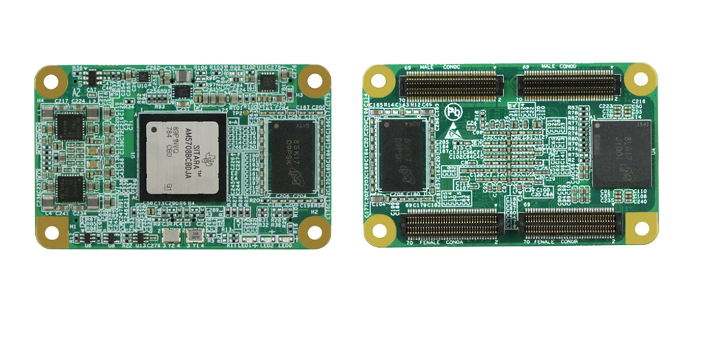
在无人机摄像头的基础上加装慧视光电开发的Viztra-LE026图像处理板,这是一块轻型化、低功耗的图像处理板,用在无人机上面既不会过多占用空间,也不会过多消耗续航,通过目标识别算法的赋能,就可以针对像东北虎这样的动物AI自动识别,一旦识别到老虎的特征物体,无人机就能够立即锁定并抵近观察,为消防和公安提供精确坐标。Viztra-LE026图像处理板采用的是瑞芯微RV1126芯片,能够输出2.0TOPS的算力。而在算法方面,成都慧视能够提供一站式AI算法训练平台SpeedDP,通过对大量动物的标注数据集的模型训练,能够实现对新数据集的快速AI自动标注,然后提升识别算法的性能。慧视微型双光吊舱能够实现昼夜成像。

YOLO单卷积神经网络在一次评价中直接从全图中预测多个boundingboxes和类概率,在全图上训练并直接优化检测性能,同时学习目标的泛化表示。然而,YOLO对边界框预测施加了严格的空间约束,限制了模型可以预测的相邻项目的数量。成群出现的小物件,如鸟类,对于此模型也同样有问题。fasterR-CNN,一个由全深度CNN组成的单一统一对象识别网络,提高了检测的准确性和效率,同时减少了计算开销。该模型集成了一种在区域方案微调之间交替的训练方法,使得统一的、基于深度学习的目标识别系统能够以接近实时的帧率运行,然后在保持固定目标的同时微调目标检测。Viztra-LE034图像跟踪板支持目标跟踪识别目标(人、车)。广西安全目标跟踪
慧视RV1126板卡可以用于大型公共停车场。流畅目标跟踪诚信推荐
设想这样一个场景:孙悟空在飞行过程中完成了一次变化(这里假设他变成了一只鸟),但这个变化并不是像西游记拍摄中有烟雾效果完成的,而就是通过身体结构发生渐变来完成的,这种情况下,检测器应该会在后续的检测任务中失败,因为设计好的检测器只是为了检测目标孙悟空的存在,孙悟空变身之后已经不存在这个目标,检测器是不会有火眼金睛继续检测到变化后的孙悟空的。但是,对于跟踪设备就不一样了,跟踪目标,哪怕目标在跟踪过程中发生了巨大变化,这些都是跟踪设备的本质能力。理想的跟踪设备应该可以很好的跟上孙悟空渐变的整个过程,并且可以继续后面变身之后对鸟的跟踪。流畅目标跟踪诚信推荐
与目标跟踪相关的文章

目标跟踪要多少钱
- 光纤数据目标跟踪售后服务 2026-06-29
- 人防目标跟踪报价行情 2026-06-28
- 山东目标跟踪哪里买 2026-06-28
- 福建安全目标跟踪 2026-06-28
- 质量目标跟踪有什么 2026-06-27
- 湖北目标跟踪生产企业 2026-06-27
- 四川目标跟踪价格信息 2026-06-27
- 浙江目标跟踪价格信息 2026-06-26
- 放心目标跟踪参考价格 2026-06-26
- 黑龙江靠谱的目标跟踪 2026-06-26
- 哪里有目标跟踪价格信息 2026-06-26
- 专业目标跟踪推荐厂家 2026-06-26
与目标跟踪相关的产品




与目标跟踪相关的新闻
-
安徽目标跟踪优势 2026-06-25 09:01:52此前,九号电动车的自平衡技术一次次刷新人们的认知,而其中一款探索版车型,甚至加入了智能摄像头,能够识别行人、障碍物,自动规划行驶路线,达成自动驾驶的目的。很多人好奇这种怎么做到的,其实很简单,车辆内部摄像头安装了具备图像处理的传感器。这种传感器就是图像处理板,这类AI板卡在目标识别算法的赋能下,就能...
-
海南目标跟踪推荐厂家 2026-06-25 07:01:25小兴安岭的日常巡护,是构筑东北生态安全的必要措施,进入冬季,整个小兴安岭将处于冰雪覆盖,按照传统的巡检模式,危险且费力。整个小兴安岭森林覆盖率达到96%,只靠肉眼的观察,很容易错过死角空白区的潜在危险,因此,无人机上线了。将无人机智能化,在吊舱的基础上加装具备智能图像处理的板卡,再通过定制算法的植入...
-
贵州视频目标跟踪 2026-06-25 05:01:40无人机只需要从基地起飞,就能够对指定区域进行巡检,智能摄像头能够自动问诊地面,识别护栏错位、路面积水、凹陷、裂缝、交通事故、车流异常等问题,然后标记位置。而控制中心能够实时查看前方画面,接收无人机回传的数据,并进行诊断分析,整个过程无需过多的人工干预。这种无人机智能问诊,是通过向无人机植入高性能的A...
-
企业目标跟踪批发价格 2026-06-25 15:01:48eVTOL是指电动垂直起降飞行器,大力开展eVTOL试点,是对低空经济的强动力注入,而无人机正是这一领域的关键选择之一。无人机在低空经济中扮演者重要角色,随着应用领域的不断增多,未来无人机的数量将呈式增长,届时eVTOL起降中心将聚集众多各式各样的无人机,如何高效有序的让无人机彼此工作而不互相干扰是...
与目标跟踪相关的问题
新闻资讯
产品推荐
-
江苏安全目标识别定制
2026-07-04 -

山东省时省力目标识别系统
2026-07-04 -
江苏安全目标识别郑重承诺
2026-07-03 -
四川应急救援视频压缩与传输解决方案
2026-07-03 -
河南哪里有目标识别24小时服务
2026-07-03 -
青海高效目标识别编号
2026-07-03 -

河南弱网视频压缩与传输无损
2026-07-03 -

河南图像识别AI智能方案**
2026-07-03 -
新疆信息化图像标注多少钱
2026-07-03