-
 甘肃农用车侧翻试验台厂家有哪些01.21
甘肃农用车侧翻试验台厂家有哪些01.21在选择车辆侧翻试验台的制造商时,技术能力是重要考量因素,具备自主研发实力的厂家通常能提供更先进的解决方案。生产规模反映企业的交付能力和质量控制水平,大型企业往往拥有更成熟的供应链和工艺保障。设备性能必...

-
 吉林冷藏车隔热性能测试设备价格01.21
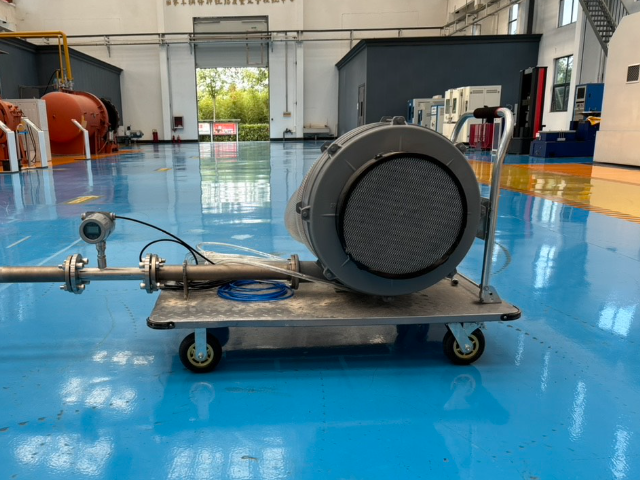
吉林冷藏车隔热性能测试设备价格01.21武汉朗维科技有限公司的冷藏车测试设备具备完整的试验功能体系,覆盖隔热、保温、降温、加热四种测试模式。每种模式单独配置参数与运行逻辑,满足不同阶段的检测需求。隔热试验用于评估厢体材料的热阻性能,保温试验...
-
 吉林农用车侧翻试验台哪里有01.21
吉林农用车侧翻试验台哪里有01.21出口至欧美市场的商用车必须通过ECE、FMVSS等国际安全法规认证,对测试数据的准确性与可追溯性提出严格要求。武汉朗维科技车辆侧翻试验台具备0.1%F.S±1e的称重精度和0.1°的角度控制精度,测量...
-
 山东汽车侧翻试验台厂家电话01.21
山东汽车侧翻试验台厂家电话01.21模拟真实侧翻场景是验证车辆安全性能的有效手段,机动车侧翻试验台通过受控的倾斜过程实现这一目标。设备利用液压或电动驱动装置平稳抬升平台一侧,使车辆在静态条件下逐渐倾斜,整个过程由自动化系统精确调控。高灵...
-
河北冷藏车测试设备品牌01.21
针对多车型并行生产的制造企业,集成化强度测试系统提供灵活解决方案。系统采用模块化架构(铝合金组合台架等组件可拆卸组合),气袋、传感器等组件可快速组合适配不同车型尺寸(长3000mm至13750mm、宽...
-
 天津冷藏车箱体强度测试设备价格01.21
天津冷藏车箱体强度测试设备价格01.21冷藏车测试设备的选择深刻影响着厢体制造企业的质量控制与产品迭代能力。设备若只满足单一性能验证,难以支撑企业对综合性能的系统性优化,而完善覆盖强度、隔热性及气密性等多维度测试需求的系统,能为设计改进提供...
-
浙江挂车侧翻试验台服务商01.21
确保车辆侧翻试验台测试过程的安全性至关重要。为此,试验台主体结构采用高刚性材料制造,确保充足的承载能力和刚性。先进的液压系统实现了平稳、可控的倾斜动作,避免了突然加速或减速的风险。多重安全保护装置,如...
-
 新疆冷藏车机械性能测试设备价格01.20
新疆冷藏车机械性能测试设备价格01.20在整车交付前的质量控制流程中,冷藏车测试设备承担着验证产品性能是否达标的职责。通过模拟实际使用中的力学与热学条件,设备对厢体结构的承载能力进行评估,检测其在载荷作用下的变形情况。门框密封与厢体接缝的气...
-
 福建汽车侧翻试验台生产厂家01.20
福建汽车侧翻试验台生产厂家01.20在车辆侧翻试验过程中,液压系统的稳定运行是保障测试精度与安全的关键。武汉朗维的车辆侧翻试验台配备完善的液压温控机制,油箱集成加热与冷却装置,确保液压油工作温度维持在15℃至55℃的理想区间,避免因油温...
-
 广西汽车侧翻试验台厂家电话01.20
广西汽车侧翻试验台厂家电话01.20在车辆侧翻试验过程中,液压系统的稳定运行是保障测试精度与安全的关键。武汉朗维的车辆侧翻试验台配备完善的液压温控机制,油箱集成加热与冷却装置,确保液压油工作温度维持在15℃至55℃的理想区间,避免因油温...
-
 中国香港汽车侧翻试验台生产厂家01.20
中国香港汽车侧翻试验台生产厂家01.20车辆侧翻试验台的车辆翻滚实验测试结果对评估和提升车辆安全性至关重要。该设备模拟车辆在极端情况下的侧翻过程,收集诸如车身结构变形、安全带系统效能及安全气囊展开效果等关键数据。这些信息不*展示了车辆在遭遇...
-
宁夏汽车侧翻试验台厂家联系方式01.20
现代整车开发高度依赖CAE仿真技术,而仿真的准确性必须通过高精度实测数据进行验证与修正。武汉朗维的辆侧翻试验台提供可重复、高精度的实车测试能力,为CAE模型提供关键输入与验证依据。系统可自动测量车辆三...