-
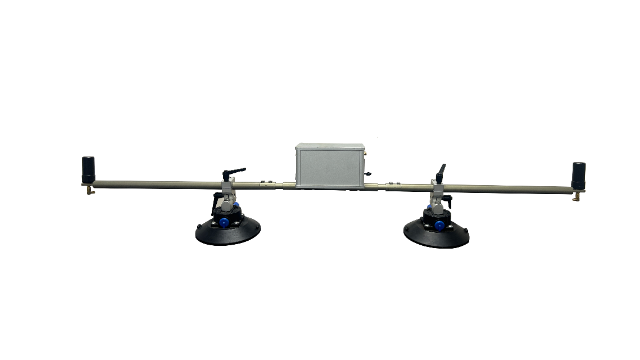
 国产多国标兼容车载姿态监测设备02.07
国产多国标兼容车载姿态监测设备02.07武汉朗维科技有限公司的车身姿态测试设备,具备良好的经济性,可帮助用户大幅降低测试成本,提升投资回报率,成为性价比极高的测试解决方案。该设备不采购成本低于进口设备,而且在运行、维护、能耗等方面的成本也低...

-
 中国台湾非接触式五轮仪有哪些品牌02.07
中国台湾非接触式五轮仪有哪些品牌02.07武汉朗维科技有限公司的车身姿态测试设备,具备先进的GNSS定位技术,可实现高精度定位,为车辆轨迹测量、位置参数采集提供支撑,凸显设备的技术优势。该设备搭载先进的GNSS接收机,支持GPS、北斗、GLO...
-
 GNSS定向包含哪些功能02.07
GNSS定向包含哪些功能02.07组合导航系统在农业领域的功能是为农机设备提供自动导航和变量作业支持,整合GNSS、INS和农田作业数据,引导农机设备按照预设路线行驶,实现播种、施肥、喷药、收割等作业的自动化、化,同时具备作业面积统计...
-
中国台湾车载姿态监测设备有哪些品牌02.07
武汉朗维科技有限公司的车身姿态测试设备,在商用车测试领域具备专项优势,可解决商用车复杂工况下的测试需求,为商用车安全运行筑牢技术屏障。商用车因用途特殊,常面临复杂工况与极限载荷,结构安全性评估尤为关键...
-
 上海高精度陀螺仪生产厂家02.07
上海高精度陀螺仪生产厂家02.07组合导航产品具备灵活的通信接口,功能是实现与各类设备的通信和数据交互,配备RS232、CAN、以太网等多种通信接口,支持多种通信协议,可灵活与载体的控制系统、数据采集系统、后台管理系统等设备对接,实现...
-
 青海深耦合RTK定位生产厂家02.07
青海深耦合RTK定位生产厂家02.07组合导航系统具备全天候工作能力,功能是在各种气象条件下,为载体提供连续、稳定的导航支持,不受暴雨、暴雪、雾、高温、严寒等恶劣天气的影响,彻底解决单一导航系统在恶劣天气下导航失效的问题。其特点是环境适应...
-
 天津无人机测距装置厂家联系方式02.06
天津无人机测距装置厂家联系方式02.06组合导航产品的特点是低功耗、长续航,功能是为便携式设备和长时间户外作业设备提供长效导航支持,化了产品的电源管理算法和硬件功耗设计,幅降低产品的功耗,同时可适配多种供电方式,包括电池供电、车载供电、太阳...
-
 四川多国标兼容车辆滑行测试设备有哪些品牌02.06
四川多国标兼容车辆滑行测试设备有哪些品牌02.06武汉朗维科技有限公司的车身姿态测试设备,具备良好的兼容性与互联互通能力,可与其他测试设备、系统无缝对接,构建一体化测试平台,提升测试工作的协同效率。该设备支持标准的通信接口,包括CAN、RS232、E...
-
 江苏整车动力性能检测设备采购02.06
江苏整车动力性能检测设备采购02.06武汉朗维科技有限公司的车身姿态测试设备,在商用车测试领域具备专项优势,可解决商用车复杂工况下的测试需求,为商用车安全运行筑牢技术屏障。商用车因用途特殊,常面临复杂工况与极限载荷,结构安全性评估尤为关键...
-
浙江工程RTK定位品牌02.06
高精度组合导航系统的性能提升依赖于硬件选型与算法设计的协同优化。系统由全球导航卫星系统接收机、惯性测量单元和数据处理模块构成,其中接收机支持多星座多频段信号接收,有助于提升可见卫星数量与定位可靠性。惯...
-
海南非接触式五轮仪厂家电话02.06
车身姿态测试设备是汽车研发、生产及检测环节的辅助设备,其度与稳定性直接决定车辆行驶安全、操控性能及乘坐舒适性,武汉朗维科技有限公司深耕该领域多年,凭借深厚的技术积累与严苛的品质管控,研发的车身姿态测试...
-
福建深耦合GNSS定向价格02.06
组合导航产品的功能是为地下工程提供导航支持,针对地下隧道、地下车库、地下矿山等GNSS信号完全失效的场景,化了INS自主导航算法,同时可融合激光雷达、视觉导航等技术,实现地下空间的高精度定位和导航,解...