-
 甘肃汽车侧翻试验台厂家电话01.24
甘肃汽车侧翻试验台厂家电话01.24针对客车这类大尺寸、高重心的车型,侧翻试验台的设计需充分考虑其结构特点与使用场景。设备必须具备足够的平台尺寸和承载能力,以容纳不同长度和轴数的客车,并能准确反映其在极限倾斜状态下的力学行为。测试数据的...

-
 贵州冷藏车隔热性能测试设备供应商01.24
贵州冷藏车隔热性能测试设备供应商01.24确保冷藏车在运输过程中维持稳定低温环境,离不开对箱体结构强度的严格检验。冷藏车箱体强度测试设备正是为此目的而设计,通过施加模拟实际运输中可能遇到的各类机械载荷,评估厢体抵抗变形和结构破坏的能力。测试时...
-
 广东客车侧翻试验台厂家电话01.24
广东客车侧翻试验台厂家电话01.24车辆侧翻试验台的日常维护对于确保设备的长期稳定运行至关重要。定期对液压系统进行检查,包括油压和油质的状态,及时更换滤芯以防止污染影响测试精度。电气系统的连接情况也需经常检测,保证所有传感器信号传输准确...
-
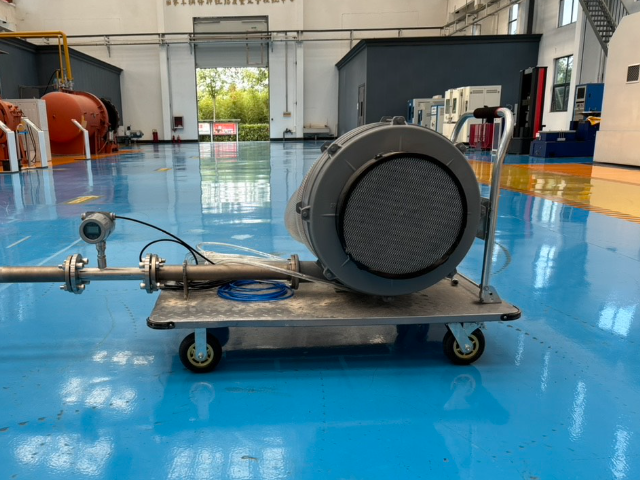
青海冷藏车隔热性能测试设备哪家好01.24
为应对多样化的运输需求,冷藏车测试设备需具备模拟复杂工况的能力。设备能够在受控环境中重现高温、低温及快速温变场景,检验车厢在极端气候下的热稳定性。通过加载测试评估结构材料在应力作用下的强度表现,预测使...
-
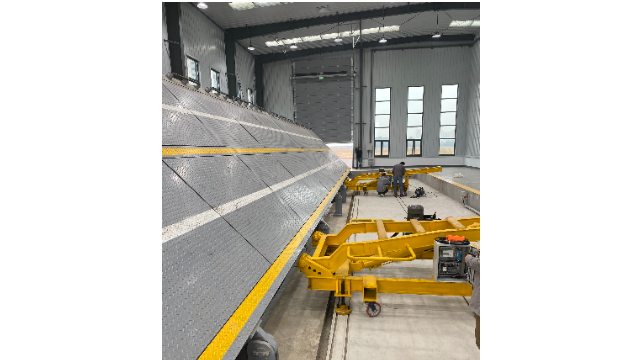
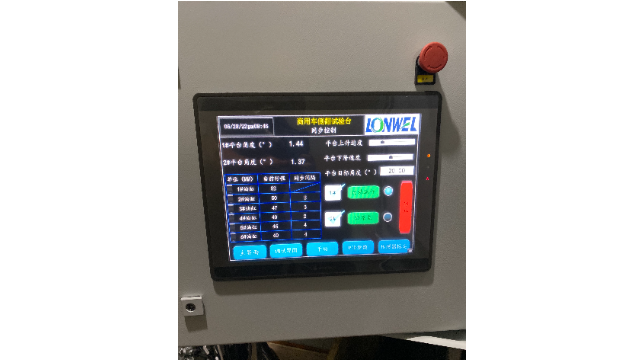
 北京农用车侧翻试验台哪家好01.24
北京农用车侧翻试验台哪家好01.24机动车侧翻试验台的工作方式基于物理姿态模拟,旨在复现车辆在极限驾驶条件下的侧向稳定性表现。设备主体为可升降的倾斜平台,由液压系统驱动实现角度调节,台面设有定位装置以确保车辆停放位置一致。测试时机动车按...
-
 云南挂车侧翻试验台01.23
云南挂车侧翻试验台01.23在汽车安全性能验证体系中,侧翻试验台生产厂家承担着提供关键测试手段的任务。这些企业专注于研发用于评估车辆抗侧翻能力的配套设备,其产品普遍应用于主机厂的研发验证与量产质检环节。具备技术实力的厂家通常拥有...
-
中国台湾冷藏车箱体强度测试设备怎么选01.23
在冷藏车测试设备中,加热功率的计算采用综合模型,兼顾设备性能与试验真实性。系统依据车厢容积、传热表面积等参数,结合设定温差与环境条件,动态测算所需加热量。计算过程纳入加热器额定功率与风机附加热效应,确...
-
海南叉车侧翻试验台服务商01.23
车辆侧翻试验台执行侧倾稳定角测试的过程需要严谨的操作流程。在测试开始前,对试验车辆进行必要的预处理工作,比如检查轮胎气压和调整载荷分布,确保符合测试要求。随后,将车辆驶入试验台,调整车轮位置使其与台面...
-
广东挂车侧翻试验台采购01.23
整车厂与零部件供应商在车辆性能问题上的责任界定常因缺乏可信数据而陷入争议,武汉朗维的车辆侧翻试验台为企业提供自主、精确的测试能力,助力快速厘清问题根源。设备可精确测定轴荷分布、质心高度及侧倾稳定角,数...
-
 重庆叉车侧翻试验台厂家有哪些01.23
重庆叉车侧翻试验台厂家有哪些01.23定制车辆侧翻试验台需围绕客户测试目标与技术适配性进行系统规划。根据待测车型的外形尺寸与质量参数,确定试验平台的承载范围与结构尺寸,确保兼容多种车型测试需求。倾斜机构的设计需匹配测试标准要求,设定合理的...
-
 河北冷藏车箱体强度测试设备价格01.23
河北冷藏车箱体强度测试设备价格01.23武汉朗维科技有限公司的冷藏车测试设备具备完整的试验功能体系,覆盖隔热、保温、降温、加热四种测试模式。每种模式单独配置参数与运行逻辑,满足不同阶段的检测需求。隔热试验用于评估厢体材料的热阻性能,保温试验...
-
河北三轮汽车侧翻试验台哪里有卖01.23
车辆侧翻试验台的购置成本受多重变量影响,难以一概而论。设备的物理规格是基础决定因素,承载能力更强、平台尺寸更大的型号因材料用量和结构复杂度增加,价格相应提高。功能配置的丰富程度直接影响整体价位,自动化...