工业机器人它只能死板地按照人给它规定的程序工作,不管外界条件有何变化,自己都不能对程序也就是对所做的工作作相应的调整。如果要改变机器人所做的工作,必须由人对程序作相应的改变,因此它是毫无智能的。作为科技创新成果的集中体现,承担防疫重任的智能机器人广受赞誉。日本《每日新闻》指出,北京冬奥会大量使用智能机器人提供服务,避免了人员接触,且效率很高。美国全国广播公司报道说,闭环场地中使用机器人,这些创新展示了北京冬奥会的高科技水平。法国24电视台称赞,这是“展现未来愿景的高科技实验室”。机器人所用的传感器有很多种 , 根据不同用途分为内部测量传感器和外部测量传感器两大类。镇江本地智能机器人标志

在自主移动机器人导航中 , 无论是局部实时避障还是全局规划, 都需要精确知道机器人或障碍物的当前状态及位置, 以完成导航 、避障及路径规划等任务,这就是机器人的定位问题 。比较成熟的定位系统可分为被动式传感器系统和主动式传感器系统。被动式传感器系统通过码盘、加速度传感器、陀螺仪、多普勒速度传感器等感知机器人自身运动状态, 经过累积计算得到定位信息 。主动式传感器系统通过包括超声传感器、红外传感器、激光测距仪以及视频摄像机等主动式传感器感知机器人外部环境或人为设置的路标 , 与系统预先设定的模型进行匹配, 从而得到当前机器人与环境或路标的相对位置 ,获得定位信息 [1] 。扬州无线智能机器人装置我们从意义上理解所谓的智能机器人,它给人的深刻的印象是一个独特的进行自我控制的“活物”。

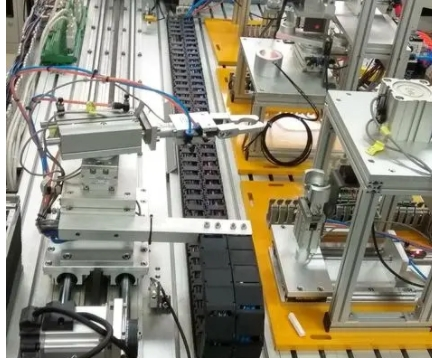
机器人所用的传感器有很多种 , 根据不同用途分为内部测量传感器和外部测量传感器两大类。内部测量传感器用来检测机器人组成部件的内部状态 , 包括: 特定位置 、角度传感器 ; 任意位置 、角度传感器; 速度、角度传感器 ; 加速度传感器; 倾斜角传感器; 方位角传感器等 。外部传感器包括: 视觉( 测量、认识传感器)、触觉(接触、压觉 、滑动觉传感器)、力觉( 力、力矩传感器)、接近觉( 接近觉、距离传感器)以及角度传感器( 倾斜、方向、姿式传感器)。多传感器信息融合就是指综合来自多个传感器的感知数据, 以产生更可靠 、更准确或更的信息。
因此,没有认识人类自己这个问题成了机器人发展道路上的绊脚石。制造“生活”在具有不固定性环境中的智能机器人这一课题,近年来使人们对发生在生物系统、动物和人类大脑中的认识和自我认识过程进行了深刻研究。结果就出现了等级自适应系统说,这种学说正在有效地发展着。作为组织智能机器人进行符合目的的行为的理论基础,我们的大脑是怎样控制我们的身体呢?纯粹从机械学观点来粗略估算,我们的身体也具有两百多个自由度。当我们在进行写字、走路、跑步、游泳、弹钢琴这些复杂动作的时候,大脑究竟是怎样对每一块肌肉发号施令的呢?在脑中起作用的是处理器,这种计算机跟操作它的人有直接的联系。

2 微传感器和智能传感器 传感器的性能、价格和可靠性是衡量传感器优劣与否的重要标志, 然而许多性能优良的传感器由于体积大而限制了应用市场。微电子技术的迅速发展使小型和微型传感器的制造成为可能。智能传感器将主处理、硬件和软件集成在一起 。如 Par Scientific 公司研制的 1000 系列数字式石英智能传感器 ,日本日立研究所研制的可以识别 4种气体的嗅觉传感器, 美国 Honeywell 研制的DSTJ23000 智能压差压力传感器等 , 都具备了一定的智能 [1] 。还有人提出将遗传算法与模糊逻辑相结合 [1] 。连云港哪些智能机器人产品介绍
视觉导航是利用摄像头进行环境探测和辨识, 以获取场景中绝大部分信息 。镇江本地智能机器人标志
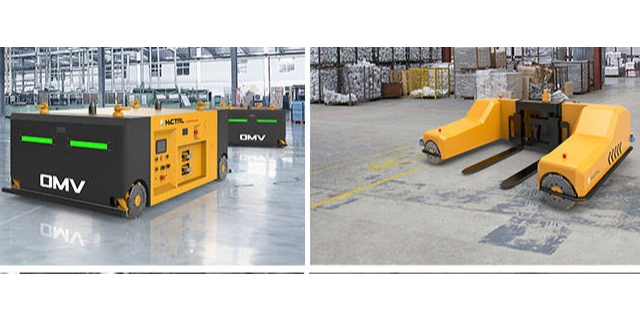
随着机器人的不断发展,人们发现固定于某一位置操作的机器人并不能完全满足各方面的需要。因此,20世纪80年代后期,许多国家有计划地开展了移动机器人技术的研究。所谓的移动机器人,就是一种具有高度自主规划、自行组织、自适应能力,适合于在复杂的非结构化环境中工作的机器人,它融合了计算机技术、信息技术、通信技术、微电子技术和机器人技术等。移动机器人具有移动功能,在代替人从事危险、恶劣(如辐射、有毒等)环境下作业和人所不及的(如宇宙空间、水下等)环境作业方面,比一般机器人有更大的机动性、灵活性。镇江本地智能机器人标志