- 品牌
- 威睿晶科
- 型号
- J5R
- 加工定制
- 是
- 精确度
- 1~5cm
- 工作温度
- -10~50(典型值)
- 峰值波长
- 905
- 工作电压
- DC 9~36(典型值)
- 是否进口
- 是
- 厂家
- 深圳市威睿晶科电子有限公司
- 产地
- 广东,深圳,北京,上海,浙江,湖北
- 量程(m)90%目标发射
- 0.1~30
- 扫描范围
- 270°
- 测量频率(khz)
- 10~50
激光雷达在AGV环境感知与定位中的关键技术解析:本文将对激光雷达在AGV环境感知与定位中的关键技术进行解析,以探讨其在提高AGV智能化水平方面的重要性。1.环境感知能力激光雷达通过发射激光束并接收反射回来的信号,可以获取周围环境中物体的距离和形状信息。这使得AGV能够对其周围环境进行准确、实时的感知。2.定位精度与稳定性激光雷达在AGV定位中的应用可实现高度精确的定位能力。通过扫描周围环境并获取地面或墙壁等参考点的位置信息,激光雷达能够对AGV进行准确的定位。这种定位方法比传统的里程计方法更加稳定可靠,不会受到轮胎滑移或地面摩擦力变化的影响。3.障碍物检测与避障AGV在运行过程中需要能够及时检测到障碍物,并做出相应的避让动作。激光雷达能够快速、准确地探测到周围障碍物的位置和距离,为AGV提供重要的避障信息。激光雷达在多个方向上的扫描能力使其能够覆盖多个的区域,从而实现四周的障碍物检测。4.地图构建与路径规划激光雷达可用于构建环境地图,为AGV提供准确的运行环境信息。通过扫描周围的物体和结构,激光雷达可以生成三维点云数据,从而实现环境的高精度建模。激光雷达,高分辨率扫描,精确捕捉环境细节。深圳3D激光雷达
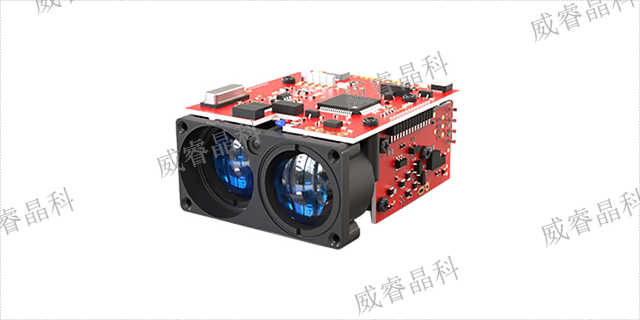
激光雷达
机械激光雷达的特点:机械激光雷达在激光雷达家族中具有独特的地位。其特点是带有控制激光发射角度的旋转部件。通过这些旋转部件的运作,激光雷达能够实现对周围环境多方位的扫描。这种扫描方式使得机械激光雷达在测量精度方面相对较高,能够获取较为详细的目标信息。然而,其缺点也较为明显,由于包含旋转部件,机械激光雷达的体积通常较大,这不仅增加了安装的难度,还使得成本居高不下。一般情况下,机械激光雷达会被安置在汽车顶部等较高位置,以获得更广阔的视野范围,在早期的自动驾驶领域应用较为广。2D激光雷达哪家好激光雷达采用高性能的激光发射与接收系统,确保了远距离、高精度的测距能力。

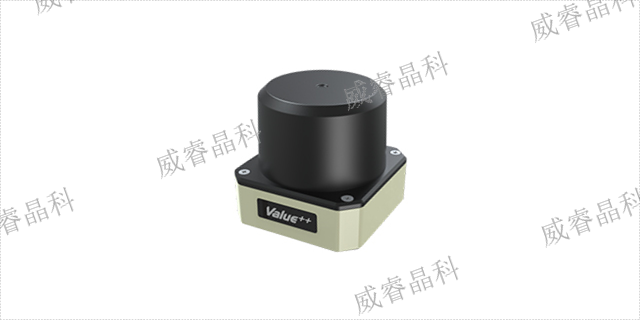
混合固态激光雷达的特性:混合固态激光雷达融合了机械激光雷达和固态激光雷达的部分特点。它没有大体积的旋转结构,采用固定的激光光源,通过内部旋转玻璃片等光学元件来改变激光光束的方向,从而实现多角度检测。这种设计既保留了一定的机械结构以实现灵活的光束转向,又减少了复杂的机械旋转部件,降低了体积和成本。在安装方式上,混合固态激光雷达通常采用嵌入式安装,能够更好地与设备整体结构相融合,不占用过多空间。在性能方面,它兼顾了一定的测量精度和可靠性,为一些对成本、体积和性能都有特定要求的应用场景提供了合适的解决方案。
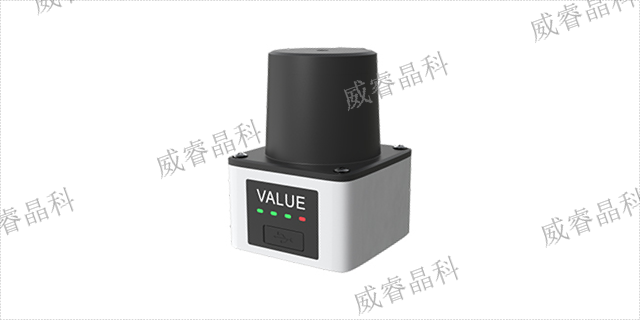
激光雷达在无人叉车中的避障和导航应用。为了实现无人叉车的高效运作和安全性,激光雷达技术被广泛应用于其避障和导航系统中。本文将探讨激光雷达在无人叉车中的具体应用,并介绍其专业性描述。激光雷达在无人叉车中的避障应用方面发挥着重要作用。通过发射激光束并接收反射回来的光,激光雷达能够快速、准确地感知周围环境,包括物体的位置、形状和距离。这种高精确性的数据为无人叉车提供了实时的障碍物检测功能,使其能够避免与障碍物的碰撞。
激光雷达在无人叉车的导航系统中也扮演着重要角色。通过对仓库或工厂内部环境进行扫描和建模,激光雷达可以生成高精度的地图。这些地图不仅包括墙壁和障碍物的位置,还可以标识出货架、货物堆放区域等重要目标。基于这些地图,无人叉车可以根据实时感知到的位置信息,准确计算出合适路径,并自主导航到指定位置。在无人叉车系统中,激光雷达通常与其他传感器(如摄像头、超声波传感器等)进行整合。通过多个传感器的协同工作,无人叉车能够更准确地感知周围环境,并做出更可靠的决策。例如,当激光雷达探测到一个障碍物时,摄像头可以用来进一步识别和分类该障碍物,从而更好地规划避障路径。 激光雷达的抗干扰能力强,能在多传感器环境中稳定输出信号。
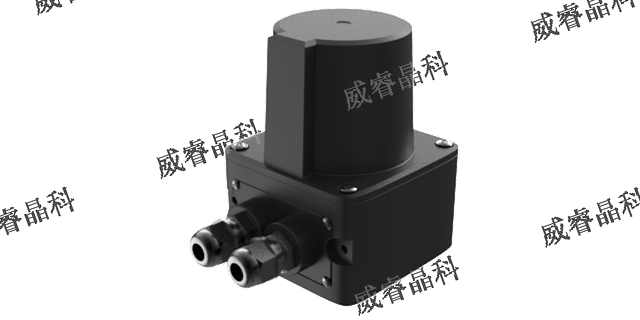
干涉法测距原理说明:干涉法测距利用了光波的干涉特性。要产生干涉现象,需要两列具有相同频率、相同振动方向的光相互叠加,并且这两列光的相位差保持固定。在实际应用中,干涉法测距技术已经相当成熟,测量精度较高。然而,它一般用于测量距离的变化情况,难以直接测量距离。因此,干涉法在干涉仪、测振仪、陀螺仪等设备中得到广泛应用。例如在干涉仪中,通过检测干涉条纹的变化来精确测量物体的微小位移或形变,为科研、工业生产等领域提供了高精度的测量手段。小型化设计,易于集成,适合多种应用场景。无人机激光雷达算法
激光雷达的分辨率远高于传统雷达。深圳3D激光雷达
提升智能仓储效率:激光雷达在物料分拣系统中的角色。本文将探讨激光雷达在物料分拣系统中的具体角色,并介绍其专业性描述。激光雷达作为高精度的环境感知工具,在物料分拣系统中起到了关键的作用。通过发射激光束并测量反射回来的光,激光雷达可以实时获取物料的位置、形状和距离等信息。这种高精确性的数据使得物料分拣系统能够更加准确地识别和定位目标物料,从而提高整个分拣过程的效率。首先,激光雷达在物料分拣系统中用于实时检测和定位目标物料。通过激光雷达的扫描和探测功能,系统可以快速而准确地探测并识别出待分拣物料的位置和形状。这种实时的感知能力使得分拣系统能够快速响应并调整机械臂或传送带的运动轨迹,以便将目标物料准确地取出并放置到指定位置。其次,激光雷达在物料分拣系统中用于避免碰撞和优化路径规划。由于激光雷达能够对周围环境进行的感知,它可以及时检测到其他移动部件、障碍物或人员的存在,并通过与系统内的算法相结合,自动调整机械臂或传送带的运动路径,避免碰撞和意外情况的发生。这种智能化的路径规划和防碰撞功能不仅提高了系统的安全性,还使得分拣过程更加高效和无缝。深圳3D激光雷达