主要由滚珠丝杠、导轨、垫块、轴承、托板、手轮等组成。分上下两层,上层利用手轮手动控制,下层由变速箱经齿轮传动控制,实现工作台往返运动。5.曲柄式五工位组合冲床模块主要由五槽槽轮机构、蜗轮蜗杆、推力球轴承、圆柱滚子轴承、台面、支架等组成。由变速箱经链传动、齿轮传动、蜗轮蜗杆传动及五槽槽轮机构分度后,实...
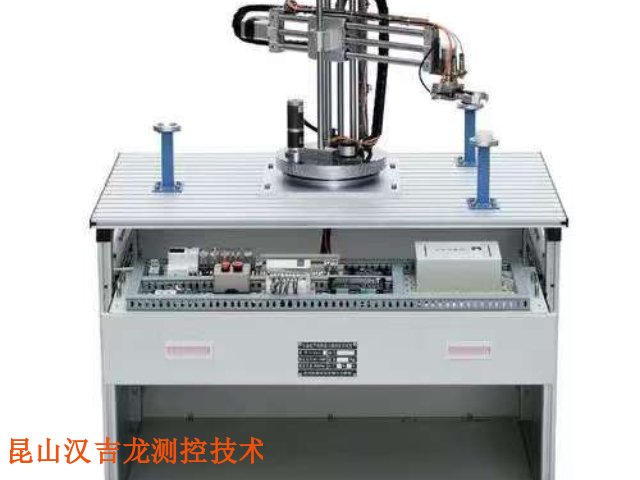
机械手实训装置基本参数
- 品牌
- VALENIAN/瓦伦尼安
- 型号
- VT-ZP300
- 类型
- 机械自动化
- 加工定制
- 是
- 用途
- 教学实训
- 电机功率
- 2
- 外形尺寸
- 1200X1000X1500
- 重量
- 30
- 产地
- 苏州
- 厂家
- 昆山汉吉龙测控技术有限公司
机械手实训装置企业商机
1.VALENIAN可编程控制器高级指令编程实训:通过实际操作,使学生深入掌握PLC高级指令的编程技巧,提升自动化控制能力。2.步进电机应用技术的掌握和实训:通过实训操作,让学生熟悉步进电机的原理和应用,掌握其在工业机械手中的关键技术。3.光电传感器应用技能的掌握和实训:实训过程中,学生将学习如何运用光电传感器实现机械手的精确控制,提升操作精度和效率,4.气动技术应用的掌握和实训:通过气动技术的实训,使学生了解气动系统的基本原理和应用,提高机械手的运动性能。5.二维双轴定位运动控制:通过实训操作,让学生掌握二维双轴定位运动控制的基本原理和方法,实现机械手的精确定位,6.编码器使用:学习编码器的使用方法,实现对机械手的精确位置检测和反馈,提高控制精度。7.开环位置控制和闭环精确位置控制实训:通过实训操作,让学生掌握开环和闭环位置控制的基本原理和应用,实现机械手的精确位置控这台机械手实训装置功能很齐全。皮带输送机械手实训装置贴牌

工作站结构认知 关键设备的特性和参数设置 工业机器人及周边设备的维护及典型错误排查 工业机器人手动控制及基本参数设置 工业机器人IO通信及PLC信息交互 工业机器人单轴运动与线性运动控制 工业机器人工具TCP参数标定 工业机器人工件坐标系参数标定及多坐标系切换 基于关键点的轨迹编程(精确定位/圆弧逼近) 基于样条曲线的轨迹编程 条件判断语句的用法及编程 循环语句的用法及编程 子程序的编程及调用 模拟码垛工艺应用编程 模拟上下料工艺应用编程 工业机器人与PLC的通讯与联调 基于Prt工业机器人离线编程软件的工作站模型环境搭建与配置 基于Prt工业机器人离线编程软件的简单平面轨迹离线编程应用 基于Prt工业机器人离线编程软件的模拟搬运码垛离线编程应用 基于P工业机器人离线编程软件的模拟上下料离线编程应用 基于Pt工业机器人离线编程软件的写字绘图离线编程应用皮带输送机械手实训装置贴牌利用它能开展多种复杂的机械手臂操控实验吗?

教学的协作机器人上下料相较于人工上下料更高效,比传统固定式上料设备更灵活,部署时间更短。通过即插即用的末端组件和简单编程,用户可快速集成各种零部件上下料方案,同一时间段内可满足流水线上多工位上料任务,快速切换生产品种,高效满足大批量或小批量定制柔性生产的需求。汉吉龙协作机器人重复定位精度高达 ±0.02 mm,在精密加工中可确保多台机器人同时操作的一致性,实现产品的标准化生产,提升生产品质,良品率达到 99% 以上。比较大 4 m/s 的节拍速度,可高效输送零件,在机床上下料中,提升生产效率 20% — 40%。
、机械手实验装置由底座、旋转底座、气动部分、三维(X、Y、Z)运动机械及电气控制等四部分组成。气动部分由电磁阀和气缸组成。三维运动机械部分是一个采用滚珠丝杠传动的齿轮传动相结合的模块化结构,用于实现定位功能。2、电气控制由三菱可编程控制器(PLC自备),步进电机驱动器、电源、传感器等组成。3、通过传感器信号采集,PLC编程,实现对步进电机、直流电机、电磁阀进行较复杂的位置控制、时序逻辑控制及开关控制等功能。4、能完成PLC主机网络及MCGS工控组态棒图动态跟踪实验教学。二、通过编程,可实现如下实验功能开机复位、横轴前伸/缩回、竖轴上升/下降、底盘旋转、手旋转、手张开/夹紧,通过编程,使上述功能按一定顺序排列即可完成将一定范围内的物品转运到指定位置。小车运动控制系统实训教学模型机械手实训装置有什么中端品牌?

VT210装置主要由自动送料模块和输送带模块组成,自动送料模块通过顶料气缸自动送料,通过传输线将物料传输到指定位置。机器人开始抓取物料。物料位置通过位置传感器检测,气缸通过PLC信号驱动。1.由2套井式料仓、圆柱料仓、皮带传输线组成,可实现圆柱及方块物料的自动推料传输与检测;配套电容传感器、光电传感器、电感传感器、霍尔传感器等2.该装置主要由自动送料模块和输送带模块组成;3.自动送料模块通过顶料气缸自动送料,通过传输线将物料传输到指定位置。4.机器人开始抓取物料。5.物料位置通过位置传感器检测,气缸通过PLC信号驱动。物料码垛单元机械手实训装置可以对接企业吗?皮带输送机械手实训装置贴牌
机械手实训装置的安全防护措施足够完善吗?皮带输送机械手实训装置贴牌
创新实训单元设计:实训单元设计灵活多变,各单元之间位置可互换,物料流动形式多向性,有助于***激发学员的创新思维,提升他们的实际操作能力和解决问题的能力。综合驱动能力训练:设备集成多种类型的电机,可对同一负载进行驱动,如分拣机可采用三相异步电机、直流电机、步进电机或伺服电机等多种驱动方式。这种设计有助于训练学员综合运用不同驱动方式的能力,提升他们的综合技能和应变能力。配备可隐藏式书桌装置,集成计算机系统、工具箱、模块存储柜通过气动组件、传感器组成的自动上料执行控制单元。通过气动组件组成的搬运物料执行控制单元通过皮带、颜色传感器、材质传感器、气动组件、电动机、编码器组成的物料分拣控制单元通过丝杆装置、步进系统、气动组件组成的仓储执行控制单元集成化G0T控制单元,可实现人机对话红色、绿色指示灯,指示系统工作状态配套3A模块,可实现模拟里输入输实验与晶体管输出的实验,增加实训项目可在线仿真,集电极开路输入,继电器输出:并配备AT89C51单片机小系统转换插座驱动三相步进电机包含两套步进电机驱动模块皮带输送机械手实训装置贴牌
与机械手实训装置相关的文章

教学机械手实训装置
- 智能制造机械手实训装置厂家排名 2025-03-01
- 智能化机械手实训装置公司 2025-03-01
- 气动系统机械手实训装置公司 2025-02-28
- 6轴机械手实训装置哪家好 2025-02-28
- 瓦伦尼安机械手实训装置用途 2025-02-28
- 原装进口机械手实训装置设备 2025-02-26
- 汉吉龙机械手实训装置贴牌 2025-02-25
- 材料仓库机械手实训装置工作原理 2025-02-24
- 维护机械手实训装置贴牌 2025-02-24
- 自动化机械手实训装置生产 2025-02-23
- 自动化装置机械手实训装置视频 2025-02-23
- 教学机械手实训装置用途 2025-02-23
与机械手实训装置相关的产品


与机械手实训装置相关的新闻
-
智能制造机械手实训装置保修 2025-02-21 10:06:22工业机械手实训装置,以其坐标式的独特设计,能够出色地实现多种自由度的精确位置控制,它涵盖了机械手的旋转、手臂的垂直上下移动、手臂的水平移动以及手爪的旋转等功能。这些功能的实现,得益于装置内部配置的晶体管式可编程控制器,其强大的控制力使得机械手能够在复杂环境下完成精细操作。1.电源输入:采用三相五线A...
-
皮带输送机械手实训装置厂家 2025-02-20 12:05:54技术创新与特点机电一体化综合实训装置实现了多种控制方式的融合,使同一种负载模型可以通过不同的驱动方式进行控制,这种设计不*锻炼了学员的实操能力,还激发了他们的创新思维,装置还集成了传感器技术、通讯及监控技术等多项先进技术,为学员提供了一个***的机电一体化技术学习环境。六、技术参数与规格该装置采用三...
-
皮带输送机械手实训装置贴牌 2025-02-20 01:06:231.VALENIAN可编程控制器高级指令编程实训:通过实际操作,使学生深入掌握PLC高级指令的编程技巧,提升自动化控制能力。2.步进电机应用技术的掌握和实训:通过实训操作,让学生熟悉步进电机的原理和应用,掌握其在工业机械手中的关键技术。3.光电传感器应用技能的掌握和实训:实训过程中,学生将学习如何运...
-
材料仓库机械手实训装置定制 2025-02-19 03:07:29技术性能输入电源:单相三线~220V±10% 50Hz工作环境:温度-10℃~+40℃ 相对湿度≤85%(25℃) 海拔<4000m,ABB工业机器人实训台,以关节型六轴串联工业机器人为**, 在操作平台的四周合理分布有多种不同工艺应用的实训模块,包含了搬运码垛工艺、分拣工艺、抛光打磨工艺、装配工艺...
与机械手实训装置相关的问题
新闻资讯
产品推荐
-

手持压缩气体泄漏检测服务内容
2026-06-20 -
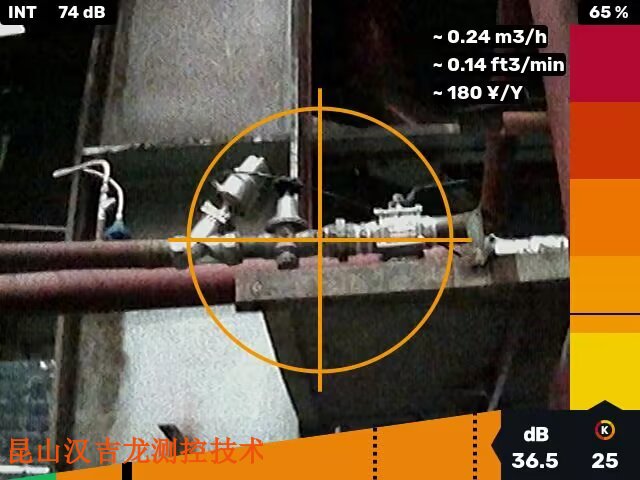
HOJOLO压缩气体泄漏检测服务服务商
2026-06-20 -

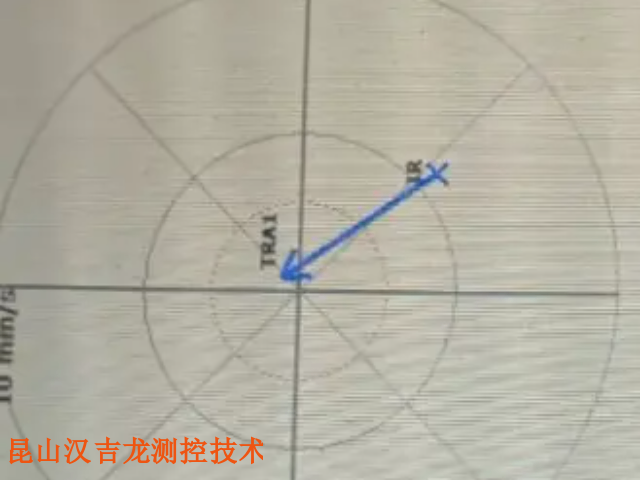
传动设备现场动平衡服务检测哪家好
2026-06-20 -
HOJOLO现场动平衡服务检测电话
2026-06-20 -

手持疏水阀故障检测服务周期
2026-06-20 -
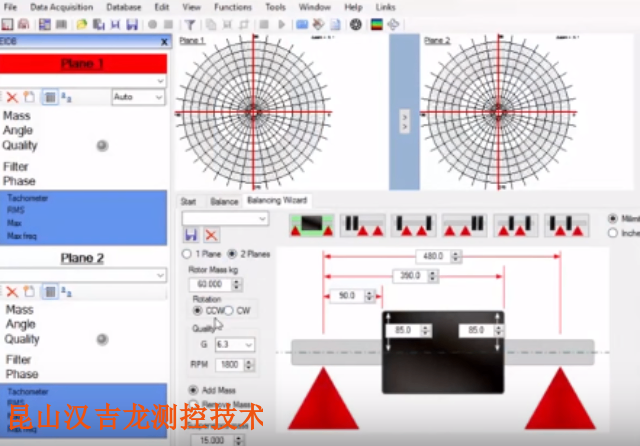
传动设备现场动平衡服务检测诊断
2026-06-20 -

10米百分表对中仪保养
2026-06-20 -

塔座现场动平衡服务检测汉吉龙测控技术
2026-06-20 -
压缩机现场动平衡服务检测
2026-06-20