- 产地
- 贵州
- 品牌
- 础润机械设备
- 型号
- 齐全
- 是否定制
- 是
XTR4/180隧道掘进机液压系统主要由油缸(包括:切割头升降油缸、切割头回转油缸、铲板油缸,掘进机、后支承油缸、一运张紧油缸、二运升降油缸、二运回转油缸)、马达(包括:行走、星轮、一运)、泵站、控制阀块以及辅助元件等组成。主要液压元件均采用国际**品牌。
XTR4/180隧道掘进机液压系统采用恒功率、压力切断、负载敏感控制,采用液压油风冷散热,杜绝了因供水不足而造成的液压油发热,有效提高液压元件寿命,降低系统故障。
除尘喷雾系统分为水系统和风机除尘装置。外来水经反冲洗过滤后,经球阀、减压阀)后,通往喷水架,由外喷雾喷嘴喷出。在切割部设置吸风口,由湿式除尘装置对灰尘进行处理,达到除尘的目的。
贵州础润机械设备有限公司是2018-06-13在贵州省贵阳市观山湖区注册成立的有限责任公司(自然人投资或控股),注册地址位于贵州省贵阳市观山湖区诚信北路81号大西南·富力中心第A6栋13层21号房。主要经营范围机城设备、机械设备耗材及配件的销售、租赁、维修及技术服务;销售:钢材,钢带、铜带、五金交电、电子产品、化工产品(除危险品)、建筑材料、润滑油;建筑工程;地基与基础工程;隧道工程:道路工程;桥架工程;市政工程;公路工程;水利水电工程;园林绿化工程;土石方工程。

EBZ135L悬臂式掘进机液压系统采用恒功率、压力切断、负载敏感控制,有效提高液压元件寿命,降低系统故障,主要液压元件均采用国际**品牌。
系统主要由油缸(包括:切割头升降油缸、切割头伸缩油缸、切割头回转油缸、铲板油缸、后支承油缸、履带涨紧油缸)、马达(包括:行走、星轮、一运)、泵站、控制阀块以及辅助元件等组成。
EBZ135L悬臂式掘进机除尘喷雾系统分冷却、喷雾水路。喷雾水路分内、外喷雾水路。外来水经一级过滤后分为三路,直接通往喷水架,由雾状喷嘴喷出,可有效抑制粉尘;第二路经减压阀、冷却器及截割电机后经洒水嘴喷出;第三路经减压后,由截割头内喷雾喷出,起到冷却截齿及灭尘作用。
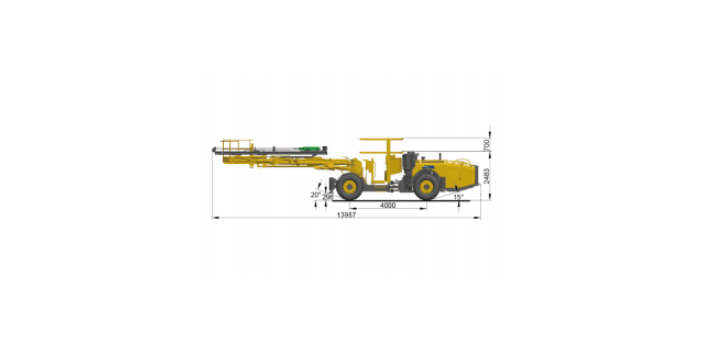
主机参数
总体长度: 13.5/21(m)
总体宽度: 3.8/3.6/3.2(m)
总体高度(机身): 2.6(m)
总重: 92(t)
切割头深度: 0.2(m)
爬坡能力: ±18°
切割电机
规格型号: YUD-260/200-4/8(1140)
额定功率: 260/200(kW)
额定电压: AC1140(V)
额定转速: 1485/737(r/min)
油泵电机
规格型号: YBS-132(B35)(1140)
额定功率: 132(kW)
额定电压: AC1140(V)
额定转速: 1486(r/min)

EBZ230K型掘进机液压系统主要由油缸(包括:切割头升降油缸、切割头回转油缸、铲板油缸、后支承油缸、履带张紧油缸、一运张紧油缸)、马达(包括:行走、星轮、一运)、泵站、控制阀块以及辅助元件等组成。主要液压元件均采用国际**品牌。
EBZ230K型掘进机液压系统采用恒功率、压力切断、负载敏感控制,使用旁通过滤技术解决了全流量吸油过滤器和回油过滤器无法去除的很多微细污染物,保证了液压油清洁度,有效提高液压元件寿命,降低系统故障。
除尘喷雾系统采用环形三层水幕除尘,水系统分冷却、内、外喷雾水路。外来水经一级过滤后分为三路,直接通往外喷雾喷水架,由雾状喷嘴喷出;第二路经减压、冷却器及截割电机后经由撒水嘴喷出,起到冷却作用;第三路经减压后,由截割头内喷雾喷出,起到冷却截齿及灭尘作用。切割机构由切割头、切割臂、切割减速机、切割电机组成。切割头采用圆锥台形结构,截齿采用凯南麦特或山特维克硬岩截齿,布齿合理,破岩能力强;切割臂内选用SKF轴承和TRELLEBORG密封,稳定可靠;切割减速机由两级行星传动,耐冲击性好;切割电机选用隔爆型三相异步电动机,安全可靠。黔东南二手掘进机价格,电控系统
XTR7/260隧道掘进机电控设备主要由电控箱、控制面板、显示器、电喇叭、急停开关、照明灯、电动机(切割电机、油泵电机、二运电机)、低浓度甲烷传感器、油温油位传感器、压力开关、双爆闪警示灯、无线遥控系统、水位传感器、压力传感器等组成。电控系统是整机的主要组成部分,与液压系统配合操作可实现整机的各种生产作业。
电控箱是XTR7/260隧道掘进机电气系统的**。控制系统将控制和保护功能模块化(主控制器)、具有故障记忆功能、遥控功能(遥控器)、电控箱与显示器之间的通讯采用CAN总线通讯,*用两芯通讯电缆便可实现,通讯电缆采用快速插头连接方式,安装方便,可靠性高。整个电气系统具有设计理念新、保护功能全、显示功能
切割机构
切割机构由切割头、切割臂、切割减速机、电机箱体及切割电机组成。切割头采用小直径硬岩切割头,外形为圆锥台形结构,在其圆周以单螺旋线螺旋分布截齿,截齿硬岩截齿,布置合理,破岩能力强。切割头可实现两种切割模式,普通模式和硬岩模式,适应不同工况,提高切割效率

煤矿用掘进机远程自动控制研究:为降低掘进机司机劳动强度,改善工作环境,增强生产安全性,改善其工作环境,设计并实现了掘进机远程自动控制系统。在介绍煤矿用掘进机工作原理、硬件组成以及软件设计的基础上,对掘进机掘进工艺流程、电力控制过程以及远程自动控制过程进行分析。该掘进机远程自动控制系统已经完成工业性试验,结果表明其实现了掘进机的远程自动控制,并且运行安全、稳定、达到预期目标。徐工掘进机 远程控制 自动控制 过程分析 煤矿等徐工集团掘进机回转耳架断裂原因分析研究。云南隧道掘进机价格 履带式掘进机行走机构的工作原理S一100型掘进机采用ME-300型液压马达,马达的输出轴插在齿轮内将动力传...
- 福建徐工掘进机 2025-11-09
- 长沙采煤掘进机维修 2025-11-09
- 福建矿山掘进机电话 2025-11-09
- 广州悬臂式掘进机租赁 2025-11-08
- 深圳煤矿掘进机支重轮 2025-11-08
- 广州掘进机价格 2025-11-07
- 湖南硬岩掘进机多少钱一台 2025-11-07
- 云南顶管掘进机厂家 2025-11-07
- 长沙悬臂式掘进机厂家电话 2025-11-07
- 广州采煤掘进机公司 2025-11-06






- 成都柴油吊电话 11-10
- 长沙地下双臂凿岩台车维修 11-10
- 成都地下铲运机维修 11-10
- 长沙XTD275-TZ2A-双臂凿岩台车型号 11-10
- 文山柴油机单轨吊批发 11-10
- 福建徐工掘进机 11-09
- 广西单轨吊多少钱 11-09
- 长沙智能双臂凿岩台车哪家好 11-09
- 成都煤矿用双臂凿岩台车多少钱 11-09
- 长沙采煤掘进机维修 11-09