- 品牌
- 帝木
- 型号
- 齐全
- 基材
- 无
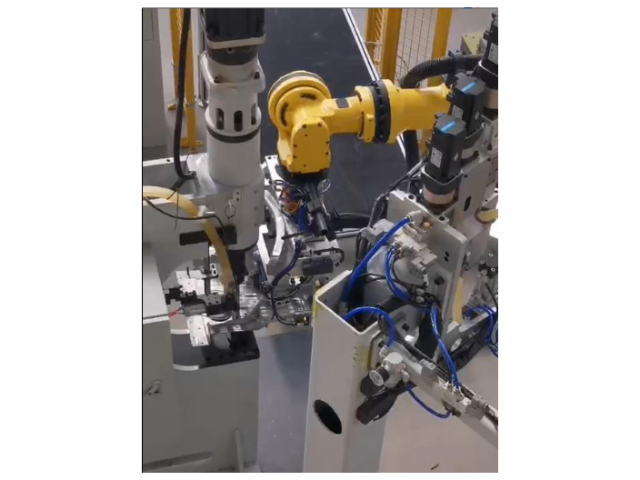
物料输送装置在机器人点焊生产线中起到连接各个环节的作用。常见的输送方式有输送带、自动导引车(AGV)等。输送带以稳定的速度将焊件从一个工位运输到下一个工位,它可以根据生产线的布局设计成直线型、环形或其他复杂的形状。在一些大型焊件的生产中,AGV的应用更为广。AGV能够根据预设的路线自动导航,将大型焊件准确地停靠在点焊机器人的工作区域。这些输送装置通常配备有定位传感器,以确保焊件在每个工位上的位置精度在毫米级别。同时,为了避免焊件在输送过程中的碰撞和损伤,输送装置还会有缓冲和保护措施,保障焊件的完整性和点焊的顺利进行。机器人点焊生产线能够自动化地完成焊接工作,降低了人为错误的风险。苏州智能工厂机器人点焊生产线上下料
在汽车制造领域,机器人点焊生产线发挥着至关重要的作用。汽车车身由大量的薄板金属件组成,需要进行大量的点焊连接。机器人点焊生产线能够高效地完成这一复杂的任务。从汽车底盘的焊接到车身外壳的组装,各个环节都离不开点焊机器人。在焊接汽车车门时,机器人可以准确地在门板内部和周边进行点焊,确保车门的强度和密封性。对于汽车车架,多个机器人协同作业,将不同形状的钢梁和金属板牢固地焊接在一起。汽车制造中的点焊生产线通常具有高度的自动化和智能化水平,能够适应不同车型和生产批次的变化,保证汽车生产的质量和效率。苏州智能工厂机器人点焊生产线上下料机器人点焊生产线具备自动检测功能,能够及时发现焊接质量问题。

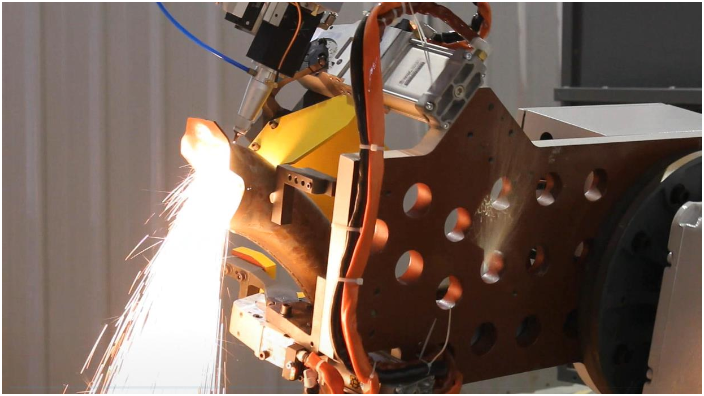
个性化解决方案:为了满足不同客户的特定需求,设计时应提供个性化的解决方案。这包括对机器人的负载能力、工作范围以及附加轴等进行定制,以适应不同大小和形状的工件。"我们的产品供货时间短,可实现点焊作业自动化的个性化解决方案"。高效节能技术:在设计点焊生产线时,应采用高效节能的焊接技术,如KUKA.RoboSpin,该技术通过在焊接过程中旋转电极以减少磨损并提高铝点焊的质量。"KUKA.Robospin可使铝的点焊磨损小和质量改善"。模拟仿真技术:利用模拟仿真技术对生产线进行"虚拟现实"设计,提前对焊枪可达性、线体节拍进行可行性验证,实现机器人离线编程及电气程序虚拟调试,以提高生产线设计的准确性和效率。"全工序所有生产线通过搭建3D数字化模型,提前对焊枪可达性、线体节拍进行可行性验证"。
机器人点焊生产线相比传统的手工点焊生产线具有许多优势。首先,机器人点焊生产线可以实现高效率的生产,很大提高了焊接速度和生产能力。其次,机器人点焊生产线的焊接质量稳定可靠,减少了焊接缺陷和质量问题的发生。此外,机器人点焊生产线还能减少工人的劳动强度,提高工作环境的安全性。机器人点焊生产线广泛应用于汽车制造、电子设备制造、航空航天等领域。在汽车制造中,机器人点焊生产线可以用于车身焊接、车门焊接等工艺。在电子设备制造中,机器人点焊生产线可以用于电路板的焊接。在航空航天领域,机器人点焊生产线可以用于飞机结构的焊接。机器人点焊生产线的工作速度快,很大缩短了生产周期。

生产线布局和优化:多机器人协同:设计多工位多机器人的复杂任务分配、调度和规划问题,以提高生产效率和灵活性。自动化控制系统:控制系统是实现生产线焊接作业自动化控制的重要基础,系统硬件组态设计是首要环节。仿真软件应用:引入ROBCAD等机器人离线仿真软件,利用3D图形设计焊接生产线仿真系统和控制系统,优化工业机器人焊接生产线的不同工艺划分和不同结构布局。自动化控制系统的实现:精确控制参数:通过自动化控制系统实现电流大小、焊接时间等参数的精确控制,从而实现焊接过程的全自动化。智能化技术:采用免示教智能焊接技术,通过信息获取、知识表示、推理与决策、执行与反馈四个流程,实现焊接过程的精确可靠。机器人点焊生产线能够高效完成焊接任务,提高生产效率。苏州智能工厂机器人点焊生产线上下料
机器人点焊生产线的操作简单,易于学习和掌握。苏州智能工厂机器人点焊生产线上下料
机器人点焊生产线在实际应用中也面临一些挑战。首先,不同产品的焊接要求可能不同,需要对机器人进行重新编程和调整。其次,焊接过程中可能会出现工件变形、焊接缺陷等问题,需要及时进行检测和修复。此外,机器人点焊生产线的维护和保养也是一个重要的问题。为了解决这些挑战,可以采取以下措施。首先,引入灵活的编程和控制系统,使机器人能够适应不同产品的焊接要求。其次,结合传感器技术,实时监测焊接过程中的变形和缺陷,并及时进行修复。此外,定期对机器人进行维护和保养,确保其正常运行。苏州智能工厂机器人点焊生产线上下料
- 常州机器人点焊生产线集成商 2026-07-27
- 南京智能机器人点焊生产线多少钱 2026-07-25
- 淮安机器人点焊生产线多少钱 2026-03-05
- 上海流水机器人点焊生产线 2026-01-22
- 流水机器人点焊生产线集成商 2025-12-04
- 常州机器人点焊生产线供应商 2025-11-29
- 江苏智能工厂机器人点焊生产线集成商 2025-11-10
- 南京流水机器人点焊生产线调试 2025-07-25
- 机器人点焊生产线管理系统 2025-07-18
- 浙江智能工厂机器人点焊生产线工作站 2025-07-09
- 徐州流水机器人点焊生产线搭建 2025-06-28
- 淮安机器人点焊生产线集成商 2025-05-15