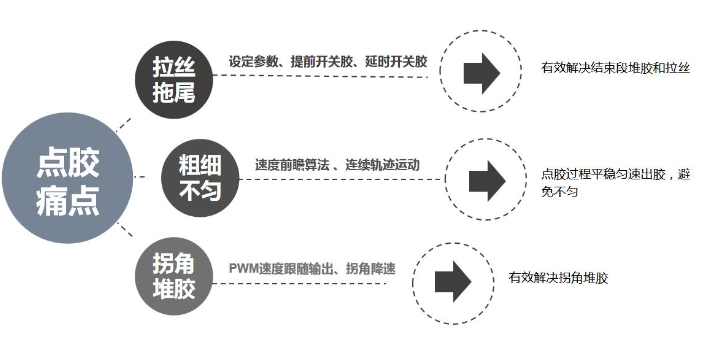
视觉点胶系统—拉丝功能:现在继续来讲视觉点胶系统。什么是拉丝?即针头离开工件表面时,点胶机会继续输出一小段胶水并迅速拔起胶嘴,使胶水形成一条类似拉丝的形状。为什么会出现拉丝的现象:在使用高粘度的胶水进行点胶时,由于胶水黏度过高,就容易出现拉丝现象。拉丝功能可以控制胶水的流量和形状,防止产生气泡或者浸润不良的问题,从而提高点胶质量和效率。旗众智能视觉点胶系统—数据采集功能:旗众视觉点胶系统在数据采集方面具备以下特点:一设备管理功能。设备状态直观显示,保证在线数据的真实性。同时提供标准化设备数据信息统计报表,包含胶水记录、点胶阀类型、工艺类型和运行数据等,并支持数据导出功能。二数据全方面采集。模块化设计,标准化管理,给客户带来更灵活的采集。三人性化操作界面。本系统采用简洁明了的工业UI设计风格,数据直观准确,页面简单,人性化操作逻辑,大幅度降低学习成本,避免误操作概率。视觉点胶系统的快速定位功能很大程度提高了工作效率,减少了生产时间。中山流水线跟踪视觉点胶系统哪家好
视觉点胶系统在面对复杂的作业环境时,可以采取以下应对策略:传感器选择:选择适合复杂作业环境的高性能传感器。例如,使用高分辨率相机可以提供更精确的图像信息,而使用激光传感器可以在光线不足或表面反射性差的情况下实现精确的测量。光照控制:对于光线条件差的环境,可以使用额外的光源来提供均匀而稳定的照明,以确保视觉系统能够准确地捕捉到工作区的图像。此外,调整相机参数,如曝光时间和增益,以适应光线条件的变化也是重要的。图像处理算法:使用先进的图像处理算法来处理复杂的作业环境。例如,使用自适应阈值算法可以在光照不均匀的情况下实现稳定的目标检测和定位。还可以采用滤波、形态学操作等技术来减少噪声和提取目标特征。姿态检测与校准:针对目标物体在复杂环境中需要出现的倾斜、旋转或形变等情况,需要使用姿态检测算法来获取准确的目标姿态信息。此外,定期进行系统校准以确保视觉系统的准确性和稳定性也是很重要的。中山流水线跟踪视觉点胶系统哪家好在半导体工业中,视觉点胶系统的高精度优势可以提升产品性能。

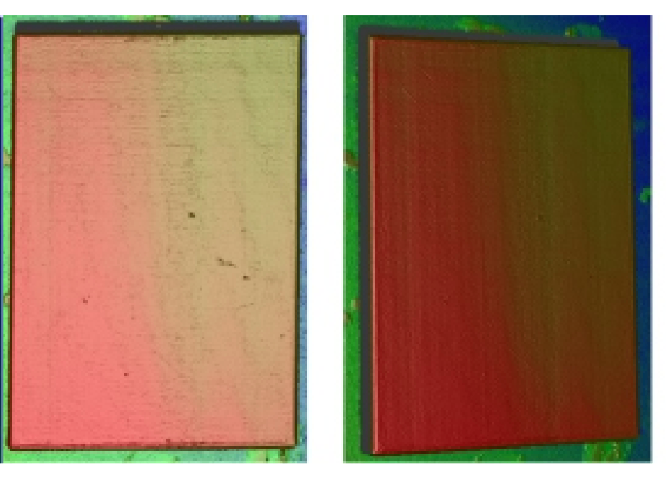
视觉点胶系统在进行点胶操作时会受到工件表面不均匀性的影响,但该系统可以通过以下方式应对这种影响:使用高精度视觉传感器进行检测:视觉点胶系统通常使用高精度的摄像头或激光传感器来获取工件表面的形状和位置信息。这些传感器具有高精度和高灵敏度的特点,可以检测出微小的表面不均匀性。进行表面预处理:在进行点胶操作之前,可以先对工件表面进行一些预处理,如打磨、清洁等,以使表面更加平整。这可以有效地减少工件表面不均匀性对点胶质量的影响。采用自适应控制策略:视觉点胶系统可以根据工件表面的不同形态和特征,采用适应性控制策略来调整点胶头的运动轨迹和速度,从而达到更加准确的点胶。
视觉点胶系统通过使用相机和图像处理算法实时检测工件表面的特征。以下是一般的工作原理:相机采集图像:系统中的相机负责将工件表面的图像捕捉下来。相机可以设置在点胶头旁边或其它合适的位置,以获得较好的视野和对工件表面的清晰成像。图像处理:通过对相机捕获的图像进行处理,包括图像滤波、光照校正、边缘检测、图像分割等步骤,提取出工件表面的特征。这些特征需要是形状、轮廓、颜色、纹理等信息。特征提取和分析:经过图像处理后,系统会对特定的特征进行提取和分析。这可以包括测量工件的尺寸、位置、角度,检测表面缺陷或异物等。特征匹配和定位:视觉点胶系统需要需要根据工艺要求将胶水精确地点在特定的位置或图案上。通过特征匹配和定位算法,系统可以将检测到的特征与预定义的目标特征进行对比,从而确定较好的点胶位置。在光学器件制造中,视觉点胶系统保证了产品光学性能和稳定性。
视觉点胶系统—坏点功能:在点胶过程中,你有没有遇到过不良品被加工或存在重复点胶的问题?别担心,有了我们的视觉点胶系统软件,这些问题将成为过去!我们的软件具备强大的坏板检测功能。通过高精度的图像识别和智能算法,它能够准确识别已经点过胶的产品,避免对同一产品进行重复点胶。而且当检测到表面存在缺陷的工件时,会自动跳过加工,有效减少废品率。在使用我们的软件时,您只需打开坏板检测功能,将产品放在加工台面上,软件将自动进行图像识别,并标记已经点过胶的区域。这样,即使产品再次经过点胶区域,软件也会及时发出警示,确保不会重复点胶。使用我们的软件,可以让设备轻松区分已经点过胶的产品,避免重复点胶和不良品的产生。无论是批量生产还是小批量定制,我们的软件都能为您提供高效、准确的点胶解决方案。视觉点胶系统在手机制造等对精度要求高的行业发挥着重要作用。中山流水线跟踪视觉点胶系统哪家好
视觉点胶系统通过图像识别技术实现自动化胶水点胶,提高生产效率。中山流水线跟踪视觉点胶系统哪家好
视觉点胶系统在使用之前需要进行定位校准,主要包括机械位置校准和视觉位置校准。机械位置校准:保证点胶准确度的前提是要先保证机械结构的准确度,因此需要进行机械位置校准。首先需要通过手动控制机械臂将各关节移动到规定位置,如机械臂的零位、水平位、垂直位等。这些位置需要与机床坐标系建立对应关系。然后需要通过机器人控制系统中的机械补偿功能,对机械臂在各关节的误差进行补偿,保证其运动的精度和准确度。视觉位置校准:首先需要安装并调试好相机、光源等视觉系统硬件设备。然后需要准备标定板,标定板上通常会有一系列已知大小的标记,可以通过标记在图片中的位置来计算相机内外参数,建立相机坐标系和机床坐标系之间的转换关系。进行视觉位置校准时,需要通过点胶笔尖和相机之间的坐标变换,将视觉坐标系中的点转换到机床坐标系中。中山流水线跟踪视觉点胶系统哪家好