-
 31 05山东人形防护防撞传感器多组信号输入
31 05山东人形防护防撞传感器多组信号输入立体空间防护传感器在自动铆接机中用于检测铆钉是否送入铆接头。铆钉通过振动盘和送钉管逐颗送至铆接头的夹爪位置。传感器安装在铆接头侧面,检测铆钉是否已经到位。铆钉到位后传感器输出信号,铆接机压紧工件并完成铆接。若送钉失败,传感器无输出,铆接机等待一定时间后再次请求送钉。连续三次送钉失败则停机报警。传感器采用反射式光电原理,红外光从探头发出,经... 【查看详情】
-
 31 05湖南工业安全防护防撞传感器灵活检测
31 05湖南工业安全防护防撞传感器灵活检测安全设备的使用周期通常较长,软件技术却在快速迭代。大德恒通承诺对已售出的防撞传感器提供终身**软件维护升级服务,确保用户始终使用***算法和比较好性能。用户可随时从官网下载***版上位机软件和固件升级包,或联系技术支持获取。升级操作简单,远程即可完成,不影响设备正常使用。这一承诺的背后,是大德恒通对自身技术持续演进能力的自信,也是对客户长... 【查看详情】
-
 31 05山西人物区分防护防撞传感器可切换多场景防护区域
31 05山西人物区分防护防撞传感器可切换多场景防护区域很多企业的安全管理停留在“制度上墙、口号喊响”的阶段,操作人员对安全的重视程度往往随着时间推移而下降。防撞传感器的引入,从技术层面改变了这一局面。当设备本身具备了“主动防撞”的能力,人员在疲劳、分心或侥幸心理下出现的不规范操作,会立即被传感器识别并触发设备停机与声光报警。这种即时的、不可回避的反馈,比任何培训都更能强化人员的安全意识。安装... 【查看详情】
-
 31 05山西高精度检测防护防撞传感器源头厂家
31 05山西高精度检测防护防撞传感器源头厂家立体空间防护传感器在化工原料自动称重系统中用于检测料斗是否放空。粉状原料通过螺旋输送机送入称重料斗,达到设定重量后停止进料,然后底门打开将原料放出。传感器安装在料斗锥体部分的侧壁,检测料斗内是否有原料残留。料斗放空时传感器输出无料信号,控制系统关闭底门,开始下一次称重循环。料斗内有原料残留时传感器输出有料信号,底门保持打开状态直到排空。传... 【查看详情】
-
 31 05吉林人物区分防护防撞传感器多组信号输入
31 05吉林人物区分防护防撞传感器多组信号输入在自动化产线中,多台机器人或设备在同一空间内协同作业,相互之间的运动轨迹可能存在交叉区域,安全风险成倍增加。大德恒通防撞传感器支持多机同时工作且互不干扰,每台传感器**检测各自负责的区域,同时可通过上位机或PLC系统进行统一协调。当某台传感器触发报警时,系统可联动周边设备同步停止或降速,避免因单台设备停止而其他设备继续运行带来的次生风险。... 【查看详情】
-
 30 05北京工业安全防护防撞传感器灵活检测
30 05北京工业安全防护防撞传感器灵活检测智能仓储机器人(AGV/AMR)在仓库中穿梭运行,与人员、叉车、货架之间存在复杂的交互风险。传统的激光雷达或超声波避障传感器多用于检测障碍物,但对人员识别不够精细。大德恒通防撞传感器可部署在仓储机器人的关键位置或仓库的固定点位,实时检测人员是否进入机器人的运行路径。当检测到人员靠近时,机器人可主动减速或绕行;若人员突然闯入危险区,则立即紧... 【查看详情】
-
 30 05激光防护防撞传感器源头厂家
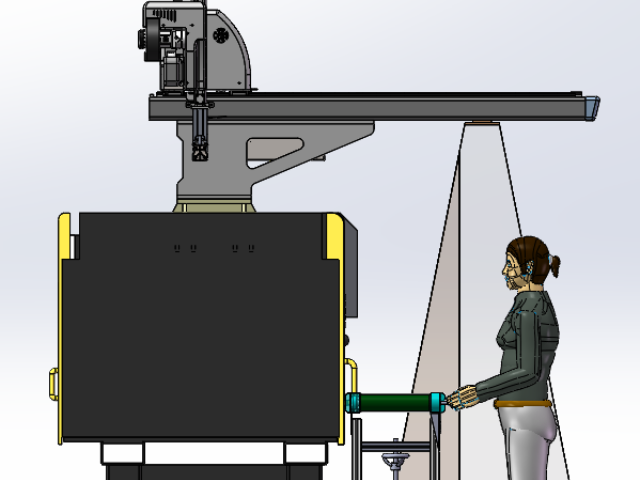
30 05激光防护防撞传感器源头厂家立体空间防护传感器在焊接机器人工作站中的应用体现在安全防护方面。焊接机器人在进行弧焊作业时,其运动范围覆盖工件台及周边区域。操作人员需要靠近工作站进行工件装卸。传感器安装在机器人上方的横梁或立柱上,监测下方空间。当人员弯腰进入工作区域时,传感器检测到人体轮廓,输出信号到安全继电器。机器人焊接电源输出被切断,焊枪停止放电。同时机器人运动轴进... 【查看详情】
-
 30 05黑龙江机械手防护防撞传感器灵活检测
30 05黑龙江机械手防护防撞传感器灵活检测立体空间防护传感器在纸箱码垛机器人中用于检测码垛层高。码垛机器人将输送线上的纸箱逐层堆叠在托盘上。每层码放完成后,传感器测量当前堆垛顶部与机器人抓头之间的距离。该距离值被用于确定下一层纸箱的放置高度。随着堆垛层数增加,距离数值逐渐减小。当距离数值小到设定阈值时,表示托盘上的纸箱已经达到预定层数。机器人停止码垛动作,发出满垛信号,由叉车将托... 【查看详情】
-
 30 05湖南工业人体感应防护防撞传感器方案设计
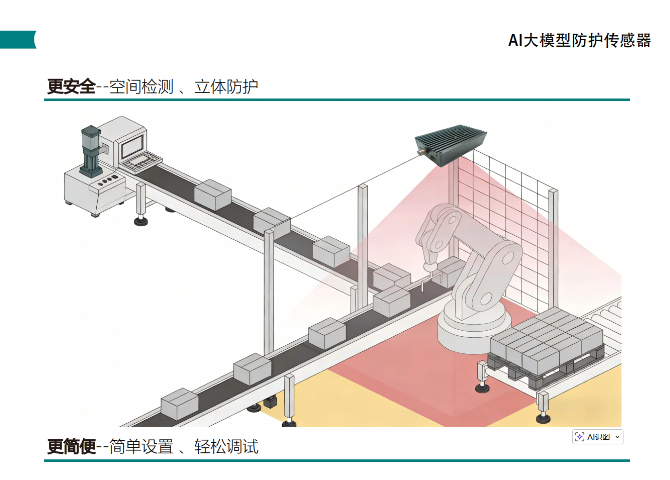
30 05湖南工业人体感应防护防撞传感器方案设计人机协作是智能制造的重要方向,但安全始终是比较大的门槛。传统协作机器人依赖力矩检测或降速运行,**了效率。大德恒通将AI大模型引入防撞传感器,为人机协作提供了全新的安全思路。传感器实时检测协作区域内的人员位置与姿态,*在人员过于接近危险区域时才触发减速或停止,而正常距离下机器人可全速运行。这种“动态安全距离”的理念,既保障了人员安全,又比... 【查看详情】
-
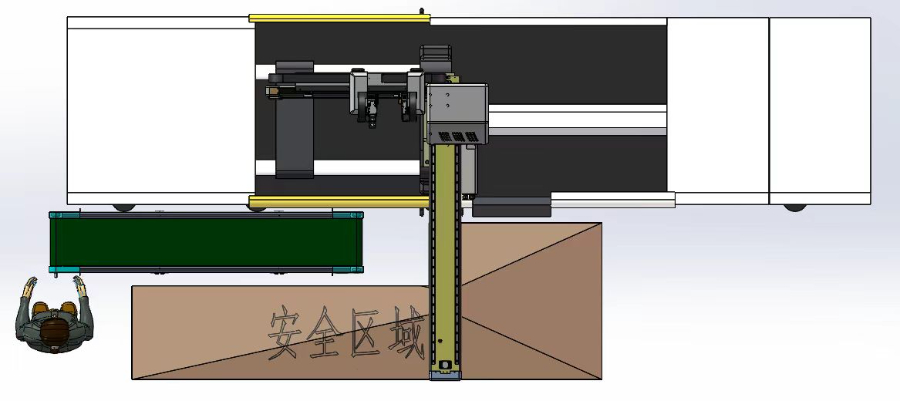
 30 05中国台湾空间防护防撞传感器多组信号输入
30 05中国台湾空间防护防撞传感器多组信号输入桁架机器人在自动化加工单元中承担工件上下料任务。机器人的横梁和立柱构成框架结构,移动部件沿轨道运行。立体空间防护传感器用于检测移动部件运行轨迹上的障碍物。在机器人高速移动时,如果轨道末端有人员站立或料架位置偏移,传感器能够在碰撞发生前检测到异常。传感器的工作方式包含主动探测和被动接收两种模式。主动模式发射红外或激光脉冲,根据反射时间计算距... 【查看详情】
-
 30 05浙江人物区分防护防撞传感器
30 05浙江人物区分防护防撞传感器立体空间防护传感器在焊接机器人工作站中的应用体现在安全防护方面。焊接机器人在进行弧焊作业时,其运动范围覆盖工件台及周边区域。操作人员需要靠近工作站进行工件装卸。传感器安装在机器人上方的横梁或立柱上,监测下方空间。当人员弯腰进入工作区域时,传感器检测到人体轮廓,输出信号到安全继电器。机器人焊接电源输出被切断,焊枪停止放电。同时机器人运动轴进... 【查看详情】
-
 30 05新疆机器人失控防护防撞传感器
30 05新疆机器人失控防护防撞传感器大型游乐设施、互动展项、VR体验区等场所,存在设备运动与游客之间的碰撞风险。传统方案依赖操作员目视监控,疲劳或注意力分散时极易发生意外。大德恒通AI大模型防撞传感器可部署在游乐设备周边,实时检测是否有游客进入危险区域。一旦检测到入侵,传感器可联动设备减速、停机或触发声光报警。由于传感器能够区分人与物体,不会因游客携带的背包、气球等物品而误... 【查看详情】


