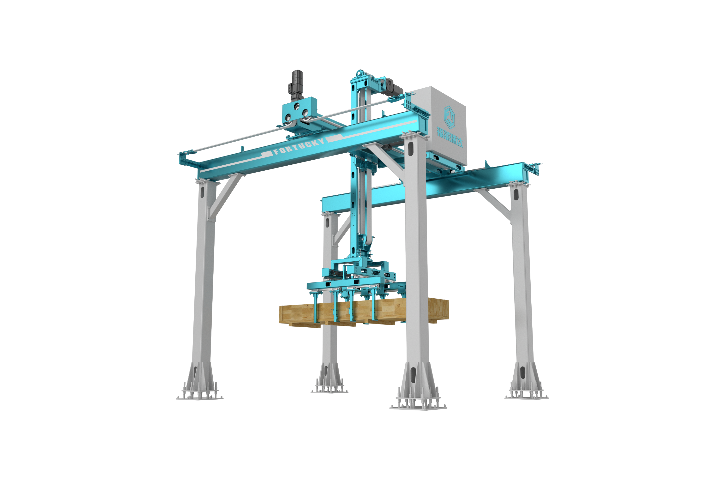
机器特点:机身的主要移动部件(除臂部外)是由碳酸纤维铸成、重量轻、扭力大、韧性强,具有较高的机械性能和较强的抗震动能力。底座采用CRP工艺制造,制造过程中用CAD和FEM优化其设计,确保了较大的底座持重能力和较低的底座重量。驱动系统采用机电一体化设计,所有轴都是由数字化交流伺服电机驱动,交流伺服驱动系统有过载、过流、缺相、超差等各种保护,性能安全可靠。机器人的各部件结构精简、容易拆装。特殊的几何构造使机器只占用极少的空间就能发挥极大的工作能力、能够充分利用工作场地空间。先进的设计令机器人能够高速、精确、稳定的运行,并易于维护。拆码垛机器人具备强大负载能力,可高效完成重型货物搬运和堆垛任务。佛山仓储机器人市场价格

码垛机器人的应用场景:码垛机器人普遍应用于各类工业领域,如食品、饮料、化工、物流、家电等行业。其中,食品和饮料行业是码垛机器人的主要使用领域,因为这些行业的产品多样化和需求变化较快,需要快速高效地完成堆叠和包装等任务。码垛机器人是现代工业自动化生产的重要组成部分,具有高效、准确、安全、节能等特点,普遍应用于食品、饮料、化工、物流、家电等行业。它的出现表示着工业自动化技术的不断进步和发展,为工业生产带来了更高效、更智能和更优良的制造服务。佛山仓储机器人市场价格制造业中,AGV 机器人可负责零部件配送,优化生产线物料供给。

AGV的工作原理:AGV的工作原理主要依赖于先进的导航技术和自动化控制系统。常见的导航方式包括磁条引导、激光引导、RFID(无线射频识别)引导等。在磁条引导方式中,AGV通过识别地面铺设的磁条来确定行驶路径;激光引导则利用激光反射器和传感器来构建环境地图,实现自主导航;RFID引导则是通过读取地面或货物上的RFID标签来获取信息,进行定位和导航。同时,AGV还配备了多种传感器,如避障传感器、超声波传感器等,以确保行驶过程中的安全性和稳定性。
普遍应用领域:三坐标机器人在多个行业中都有普遍应用,包括汽车制造、航空航天、电子、机械制造等。例如,在汽车制造中,三坐标机器人用于检测汽车零部件的尺寸和位置精度;在航空航天中,用于检测飞机零部件的几何量,确保飞行器的安全性和可靠性。技术参数和选择注意事项:三坐标机器人的技术参数包括测量范围、测量精度和探针系统等。选择时需要根据实际需求进行匹配,确保设备能够满足生产需求。三坐标机器人结构及作用:机器运动:机械臂和工作台通过精密机械设计和电机控制技术实现高精度的位置控制和速度调节。控制系统:包括电路控制和PLC控制,实现信号的转换和放大,以及电机的驱动和控制等功能。应用领域:三坐标机器人普遍应用于机械制造、汽车制造、航空航天等领域,用于测量各种零部件及总成的空间坐标,评价长度、直径、形状误差、位置误差等,完成过程控制、质量控制和逆向成型等任务。三坐标机器人结构简单,运行稳定,常用于实验室和生产线的自动化测量工作。
货物识别与精确拣选:货物标签扫描:AGV拣选机器人在执行任务前,会先通过扫描或读取货物的标签信息,确定货物的位置和属性。这使得AGV能够准确地找到需要拣选的货物。精确搬运与放置:AGV到达货物所在位置后,会使用其装载机构将货物拾起,并按照规划的路径将其搬运到指定的拣选区域或出库口。在“货找人”模式下,AGV拣选机器人会根据订单需求,自动将货物搬运到拣选人员或复核包装人员的边上,确保货物准确送达。综上所述,AGV拣选机器人通过先进的导航与定位技术、智能管理系统与实时监控、货物识别与精确拣选以及定制化设计与安全防护等多种方式,确保货物拣选的准确性。这些技术和措施的应用,不*提高了拣选效率,还降低了人工劳动强度,优化了库存管理流程,为企业的仓储管理带来了明显的效益。仓储物流中,AGV 机器人可快速准确地将货物搬运至指定库位。东莞移动机器人供应
往复式 AGV 机器人在固定路线上往返运行,适用于特定场景。佛山仓储机器人市场价格
AGV具有高度的自动化水平,可以极大地降低人力成本并提升工作效率。由于其自主导航和自动化操作的特点,AGV可以实现24小时连续工作,而无需人工干预。这意味着AGV可以在无人值守的情况下进行作业,较大程度上提高了生产线的效率和生产能力。此外,AGV还可以与其他设备和系统进行集成,实现更高级别的自动化物流操作。另外,AGV还具有灵活性和可扩展性。通过编程和配置,可以根据使用者的需求对AGV进行定制化设置,以适应不同行业的需求。佛山仓储机器人市场价格