(下篇)疲劳驾驶预警设备在商用车上的推荐安装位置需要满足能够时时刻刻监测到驾驶员面部的条件,以确保设备能够有效地捕捉到驾驶员的疲劳状态。以下是一些推荐的安装位置:
在安装疲劳驾驶预警设备时,还需要注意以下几点:安装角度:设备应安装在驾驶员正前偏右30°范围内,且角度越小越好,以确保设备能够准确地捕捉驾驶员的面部特征。安装距离:设备与驾驶员面部的距离应保持在60cm~120cm之间,建议安装在80cm左右的位置,以确保设备能够清晰地捕捉到驾驶员的面部图像。避免遮挡:设备应安装在不会遮挡驾驶员视线或干扰驾驶员操作的位置,以确保驾驶员的行车安全。稳固性:设备应牢固地安装在车辆上,以避免在行驶过程中松动或移位,影响设备的正常使用。
综上所述,疲劳驾驶预警设备在商用车上的推荐安装位置应满足能够时时刻刻监测到驾驶员面部的条件,并考虑设备的安装角度、距离、稳固性以及避免遮挡等因素。具体安装位置可能因车型和设备的不同而有所差异,建议根据车辆实际情况和设备说明书进行安装。 DSM-7疲劳驾驶预警系统PCI盒子会插入主机的PCIe插槽中,通过插槽提供的电力和数据通道与主机进行通信.山东司机行为检测预警系统调查问卷
(中篇)车载自带算法的疲劳驾驶预警集成MDVR实现云台管理的原理
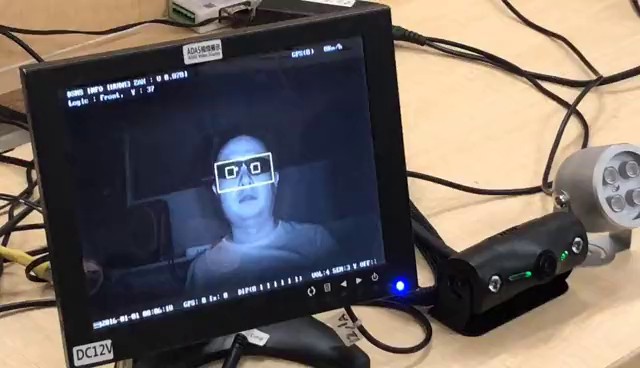
2.3云台控制-自动追踪:-通过疲劳检测算法分析驾驶员头部位置,动态调整云台角度,确保摄像头始终对准驾驶员面部。-使用人脸识别和头部姿态估计技术,实现精细追踪。-远程控制:-通过云平台或用户终端,管理员可以手动调整云台角度,优化监控范围。
2.4MDVR集成-视频录制与存储:-MDVR实时录制车内视频,并将视频数据存储到本地或上传至云平台。-支持循环录制,确保存储空间高效利用。-数据同步:-将疲劳检测结果与视频数据同步,便于后续查看和分析。-事件触发录制:-当检测到疲劳驾驶或其他异常事件时,MDVR自动标记并保存相关视频片段。
2.5数据传输与云平台管理-数据传输:-通过4G/5G网络将视频数据、疲劳检测结果和传感器数据上传至云平台。-远程管理:-管理员可以通过云平台查看实时视频、调整云台角度、下载历史数据。-预警通知:-当检测到疲劳驾驶时,系统通过云平台向管理员或驾驶员发送预警通知。
3.关键技术-计算机视觉:用于驾驶员面部特征提取和疲劳状态识别。-云台控制算法:实现摄像头的自动追踪和角度调整。-边缘计算:在车载终端进行实时数据处理,减少对云平台的依赖。 中国台湾大车司机行为检测预警系统厂家自带算法的疲劳驾驶预警系统通过其丰富的外接设备联动接口,连接方向盘振动器,座椅振动器,实现预警功能.

(下篇)自带算法的疲劳驾驶预警系统是一种先进的技术,旨在通过监测驾驶员的疲劳状态并及时发出预警,以提高驾驶安全。该系统具有丰富的外WEI设备联动接口,可以连接多种设备以实现全方WEI的预警和管理功能。以下是对该系统可连接的方向盘振动器、座椅振动器以及MDVR平台进行详细阐述:
三、系统特点与优势智能化:系统内置先进的神经网络人工智能视觉算法,能够实时分析驾驶员的脸部、眼部、体态等细节特征,准确识别疲劳驾驶行为。多样性:系统不仅可以通过振动方式向驾驶员发出预警信号,还可以通过MDVR平台进行多种方式的远程监控和管理。实时性:系统能够实时监测驾驶员的疲劳状态,并在检测到疲劳时立即发出预警信号,有效避免交通事故的发生。高效性:通过MDVR平台的数据分析和远程管理功能,管理人员可以更加高效地管理车队和驾驶员,提高运营效率。
综上所述,自带算法的疲劳驾驶预警系统通过其丰富的外WEI设备联动接口,可以连接方向盘振动器、座椅振动器以及MDVR平台等多种设备,实现全方WEI的预警和管理功能。这些功能不仅提高了驾驶安全性,还为车队管理和安全驾驶提供了有力支持。
(中篇)自带算法的疲劳驾驶预警系统是一种智能化的安全设备,它能够通过分析驾驶员的生理特征、驾驶行为及车辆行驶状态等信息,实时监测驾驶员的疲劳状态,并在必要时发出预警信号。以下是对该系统的报警状态及报警参数的详细阐述:
这是为了确保在正常的驾驶速度下,系统能够有效地发挥作用。驾驶员行为:如明显的打哈欠行为、长时间低头、视线偏离正常范围等,都可能触发预警。摄像头遮挡:如果系统摄像头被遮挡超过一定时间(如15秒),也会触发预警,以提醒驾驶员确保摄像头清晰可见。报警阈值:报警阈值是指系统触发预警的条件阈值。例如,眨眼频率、闭眼时间、头部运动幅度等参数达到或超过一定阈值时,系统会认为驾驶员处于疲劳状态并触发预警。这些阈值通常根据大量的实验数据和统计分析得出,以确保预警的准确性和可靠性。灵敏度等级:一些系统可能提供灵敏度等级设置,以便用户根据实际需求进行调整。灵敏度等级越高,系统对驾驶员行为和车辆状态的监测越敏感,触发预警的可能性也越大。反之,灵敏度等级越低,系统则相对更加“宽容”,触发预警的条件也更加严格。 疲劳驾驶预警系统主要在哪些领域应用?

(下篇)自带算法识别与云端识别的司机疲劳驾驶预警系统各自具有独特的应用区别与优势,以下是对这两者的详细分析:
云端服务器具有强大的计算能力和存储能力,能够处理大量数据并快速做出决策。系统架构:系统包括前端采集设备(如摄像头)、数据传输网络和后端识别服务器等关键组件。前端设备负责数据采集,后端服务器负责数据处理和决策。由于数据存储在云端,多个设备可以共享数据,实现协同工作和数据分析。云端服务器可以方便地更新和升级算法,提升识别精度和适应性。云端服务器具有强大的数据存储能力,可以长期保存驾驶员的驾驶数据。这些数据可以用于后续的数据分析和研究。由于数据存储在云端,系统可以与其他云端服务进行集成,实现跨平台协同工作。例如,可以与车队管理系统、智能驾驶辅助系统等集成,共同提升驾驶安全。通过云端计算资源,系统可以实现高效的算法处理和数据分析。
总结:自带算法识别的系统具有实时性强、稳定性高、成本低和自主性强等特点;而云端识别的系统则具有算法更新方便、数据存储能力强、跨平台协同和资源利用率高等优势。在选择时,用户应根据自身需求和场景特点进行权衡,选择ZUI适合自己的系统方案。 疲劳状态的判断基于驾驶员的面部特征(眨眼频率,闭眼时间,头部运动),眼部信号,体态特征及车辆行驶状态信息.陕西车元素司机行为检测预警系统
车侣DSMS疲劳驾驶预警系统在危险品领域应用效果怎么样?山东司机行为检测预警系统调查问卷
(上篇)自带算法的疲劳驾驶预警系统采用独特的图像识别技术,能够在复杂多变的驾驶环境中有效监测驾驶员的疲劳状态,同时避免外界光源对监测效果的干扰。以下是对该系统如何避免外界光源干扰的详细阐述:
一、光源校准与滤光技术光源校准:系统使用光源校准工具对光照进行精确校准,确保检测环境内光照条件的一致性和稳定性。这有助于减少不同光源带来的亮度差异,从而降低干扰。滤光器应用:通过应用滤光器,系统能够过滤掉特定波长的光线,只允许特定波长的光线通过。这种技术有助于减少光线反射和散射造成的干扰,提高图像识别的准确性。
二、偏振光源与偏振片的使用系统采用偏振光源和偏振片,通过控制光的偏振方向来消除不需要的背景光和杂散光。这种方法能够只保留检测所需的偏振方向的光,从而有效避免外界光源的干扰。
三、图像预处理与增强技术图像去噪与增强:在图像识别过程中,系统首先对采集到的图像进行去噪和增强处理。这有助于提高图像质量,减少因光源干扰而产生的噪声和伪影。特征提取与匹配:系统从处理后的图像中提取有用的特征信息,如颜色、纹理、形状等,并与已知特征库进行匹配。这一过程能够进一步降低外界光源对识别效果的影响。
山东司机行为检测预警系统调查问卷