(上篇)车载红外热像仪在主动安全预警系统中的应用价值明显,主要体现在以下几个方面:
一、提升夜间及恶劣天气下的行车安全增强夜间视距:红外热成像技术不依赖光源,能够在夜间或低光照条件下清晰成像,有效增强驾驶员的视距,提高夜间行车的安全性。穿透恶劣天气:在雨雪、雾霾等恶劣天气条件下,红外热成像技术能够穿透这些障碍,依然保持较好的成像效果,为驾驶员提供清晰的道路和障碍物信息,减少因天气原因导致的交通事故。
二、实现行人和车辆的精细识别与预警行人识别与预警:车载红外热像仪能够精细识别道路上的行人,特别是在夜间或光线昏暗的情况下,通过AI算法对行人进行闪框提示、图像预警和声音预警,有效避免与行人的碰撞事故。车辆识别与追踪:同样地,车载红外热像仪也能够识别并追踪前方的车辆,为驾驶员提供实时的车辆位置和速度信息,有助于保持安全车距和避免追尾事故。
三、提高车辆故障诊断与维护效率发动机状态监测:通过监测发动机的温度分布,车载红外热像仪可以帮助驾驶员及时发现发动机过热、冷却系统故障等问题,避免发动机损坏和由此引发的安全事故。
8路4G360全景硬件上预留了丰富的接口(如RS232,RJ45,以太网,CAN等)及适配多种不同的视频格式输入,输出.山东商用车主动安全预警系统
自带算法的ADAS(高级驾驶辅助系统)前车防碰撞系统的工作原理,主要依赖于多种传感器、复杂的算法以及车辆控制系统的紧密协作。
一、系统组成
ADAS前车防碰撞系统主要组成:包括毫米波雷达、激光雷达、单目或多目摄像头等,用于实时收集车辆前方的位置、速度、距离等环境数据。对摄像头采集的图像数据进行处理,包括自动对焦、自动曝光、颜色校正等。内置高级算法,对传感器收集的数据进行深度分析,根据ECU的指令执行相应的动作,发出警报。
二、工作原理
数据采集传感器(如毫米波雷达、激光雷达、摄像头)持续监测车辆前方的道路环境,收集前方车辆的位置、速度、距离等关键信息。摄像头捕捉前方道路和车辆的图像,通过ISP进行图像处理,数据处理与算法分析ECU接收传感器和ISP传输的数据,运用内置的复杂算法进行分析。声光报警装置会发出警报。
三、关键技术图像识别
通过图像处理算法识别前方车辆和车道线等信息。多种传感器数据(如雷达测距、摄像头图像分析),精确计算与前方车辆的距离。基于当前车辆和前方车辆的状态数据,预测未来一段时间内两车的相对位置变化,评估碰撞风险。根据碰撞风险的评估结果,制定并执行相应的控制策略,发出警报。
黑龙江物流车主动安全预警系统开发商叉车安全防碰撞预警系统,结合了传感器技术,物联网,云计算和人工智能,对叉车作业实时监控,数据分析和预警.

带云台监控管理主动安全一体机在实际应用中解决了多个实际问题,主要体现在以下几个方面:
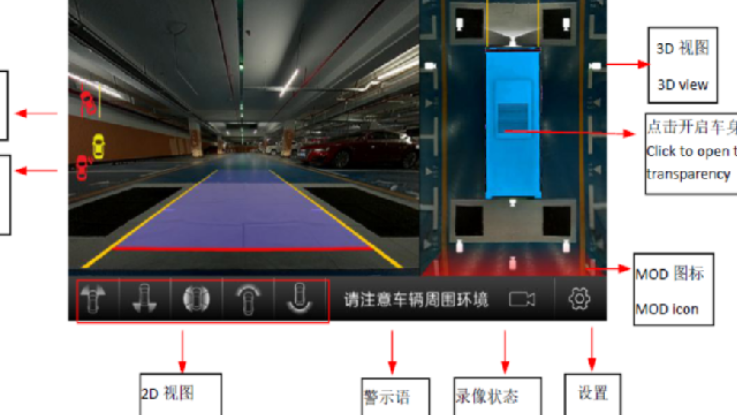
一、提升驾驶安全性盲区预警:360°全景影像系统和BSD盲区预警功能,结合AI技术对车辆周围进行实时检测,识别并跟踪潜在的危险物体,如行人、其他车辆等。在预测到潜在危险时,系统进行声光电告警,有效避免盲区碰撞事故。外置语音告警装置和车内显示屏的同步放大功能,实时提醒驾驶员注意盲区物体。
二、增强行车监控与记录行车视频记录:支持SD卡对车辆行驶过程进行实时本地记录,为交通事故的责任认定提供有力证据,同时也有助于车队管理和车辆安全监控。
三、提高车辆运营效率智能限速:一体机具备限速开关信号输出功能,能够实时监测行人等障碍物,并在必要时触发语音告警和限速功能,有助于维护交通秩序和提高车辆运营效率。通过云平台接入功能,可以实现车辆的远程监控和管理,包括实时查看车辆位置、行驶轨迹、监控画面等,为车队管理提供便利。
四、适应多种安装环境云台灵活性:云台设计使得摄像头可以水平和垂直运动,适应不同的监控需求。同时,云台还具备防护罩等保护措施,确保摄像头在恶劣环境下也能正常工作。支持侧装和吊装等多种安装方式,满足不同场景下的安装需求。
自带算法的ADAS(高级驾驶辅助系统)具有多种预警功能,这些功能通过车辆上的传感器、摄像头等设备实时监测车辆周围的环境,预测潜在危险,并向驾驶员发出警告,从而提高驾驶安全性。以下是ADAS系统常见的预警功能:
1,车道偏离预警(Lane Departure Warning/Lane Keeping Assist):当车辆开始偏离其行驶的车道时,系统会发出警告,有些系统还会通过辅助控制车辆方向盘来帮助车辆保持在车道内。这一功能主要通过车载摄像头或其他传感器监测车辆在道路上的位置,并与车道标线进行比较。
2,前碰撞预警(Forward Collision Warning/Forward Collision Mitigation):当系统检测到与前方车辆或其他障碍物有碰撞风险时,会向驾驶员发出警告,并在某些情况下自动采取制动措施,以减轻或避免碰撞。这一功能通过前置雷达、摄像头等传感器监测前方道路情况,结合车辆速度和驾驶员的制动反应时间来评估碰撞风险。
3,行人检测与预警(Pedestrian Detection/Warning):系统能够识别前方的行人,并在存在碰撞风险时向驾驶员发出警告。有些系统甚至能够自动减速或刹车以避免碰撞。行人检测功能主要通过摄像头或雷达实现,结合图像处理和机器学习算法来识别行人。 主动安全预警车载云台监控系统可以通过远程监控端实时查看车辆的行驶轨迹和位置信息,提高运输效率.

(上篇)主动安全一体机主机的技术参数通常涵盖多个方面,包括硬件规格、输入输出接口、功耗、工作温度等。以下是根据参考文章整理的主动安全一体机主机的一些主要技术参数:1.硬件规格CPU:内核采用ARMCortex-A7双核,主频≥,部分高DUAN型号可能采用更强大的处理器,如第11代英特尔®酷睿™i5-11400。内存:通常配备1GB或更高容量的内存,以支持多任务处理和流畅运行。存储:内置8GBeMMC闪存或更高JI别的SSD硬盘,部分产品支持机械硬盘/SSD,ZUI大可达2T。显示:部分一体机配备触控一体屏,分辨率可达1920x720或更高,如1920*1080IPS,支持多通道同步音视频回放。2.输入输出接口视频输入:支持4路+(预留)2路AHD信号接入,部分产品支持高达6路1080P视频输入。视频输出:支持视频显示分辨率如1280x720,60fps,部分产品提供VGA或HDMI输出。音频:通常具备1通道录YIN和1通道回放功能。开关量检测:支持多路开关量输入和输出,如4路、11路输入,1路输出等。CAN接口:至少提供1路CAN。串口:预留1路TTL串口或更多。网络接口:支持4G全网通通信,部分产品预留GPS、北斗双模定WEI。USB接口:提供USB,用于数据传输和设备连接。毫米波雷达具有很高的探测精确度,分辨率和穿透力,在复杂环境精确探测出车辆周围的人员设备和其他障碍物.浙江起重机主动安全预警系统定制开发
4G 360全景影像网口视频流传输为工业机器人提供了视觉盲区与远程操控解决方案.山东商用车主动安全预警系统
360全景影像在4G和5G网络下的应用区别主要体现在数据传输效率、影像质量、系统响应速度以及多设备连接与扩展性等。
一、数据传输效率
在4G网络下,360全景影像的数据传输速率相对较慢,导致数据传输过程中存在一定的延迟。尤其是在实时传输高清视频流时,延迟可能会更加明显。5G网络能够提升360全景影像的数据传输效率。5G网络的高速传输能力确保了影像数据的即时传输。
二、影像质量
360全景影像在4G网络下的清晰度和流畅度可能受到一定影响。在传输高清视频流时,可能会出现画面模糊或卡顿的情况。5G网络的高带宽特性使得其能够支持更高质量的视频流传输。360全景影像的清晰度更高,流畅度更好。
三、系统响应速度
4G网络的时延相对较高,360全景影像系统在处理预警、防撞等功能时的响应速度可能较慢。5G网络具有低时延的特点,在预警和防撞等场景中,5G网络能够更快地传输相关信息,提高系统的安全性和实时性。
四、多设备连接与扩展性
在4G网络下,同时连接的设备数量可能受到一定的限制。这会影响系统的扩展性。5G网络支持更多设备的同时连接,为车队管理、多车辆协同等提供了更大的便利。5G系统的可扩展性更强,能够轻松应对未来设备数量的增加,满足不断变化的业务需求。
山东商用车主动安全预警系统