- 品牌
- 诺尚
- 型号
- 条形料场斗轮机无人值守、圆形料场堆取料机无人值守
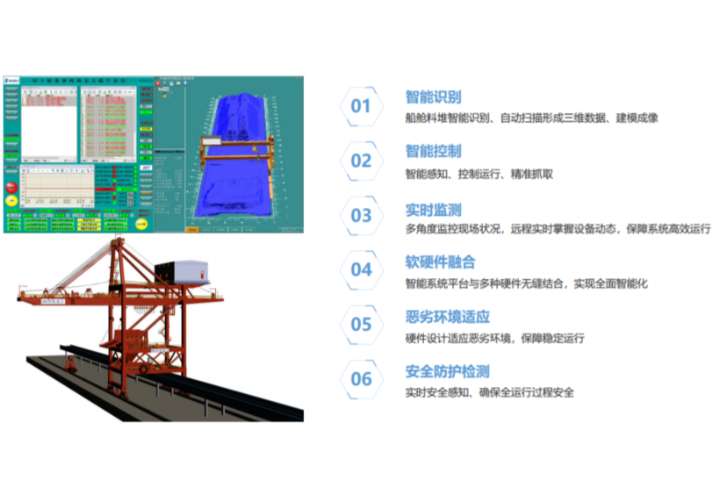
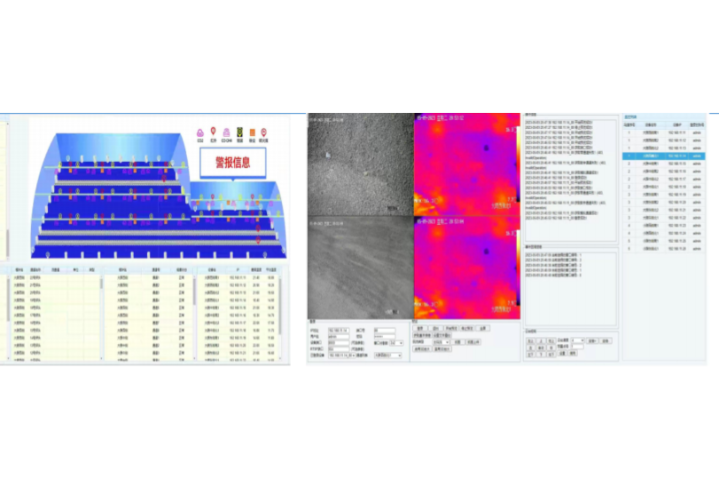
无人值守系统的检测模块集成了激光扫描、料位监测、斗轮机定位及安全防护等多个关键组成部分。激光扫描系统安装于堆料机结构上,负责对料堆进行扇形扫描,实时捕捉其形态变化,减少了数据盲区。料位检测系统则借助雷达传感器,监测设备与料堆的距离,从而辅助控制设备负载,确保作业的准确性。斗轮机定位识址模块采用格雷母线技术,通过电子编码器和电磁发射器实现设备位置的精确测量,支持堆取料机的精细操作。同时,安全防护系统配备毫米波与超声波雷达,形成多层障碍物检测,降低碰撞风险。无线通信和视频监控系统为检测模块提供稳定的数据传输和实时画面,保障中控系统对设备状态的掌握。各模块结合PLC控制系统,实现对堆取料机的综合监测与智能调度。上海诺尚信息技术有限公司凭借丰富的工业自动化经验,整合多项检测技术,打造了性能稳定的无人值守系统,助力客户提升料场管理的安全性和效率。料位检测堆取料机无人值守系统基于传感器实时采集堆料高度数据,结合智能算法动态调整取料策略。高精度视频监控激光扫描堆取料机无人值守系统
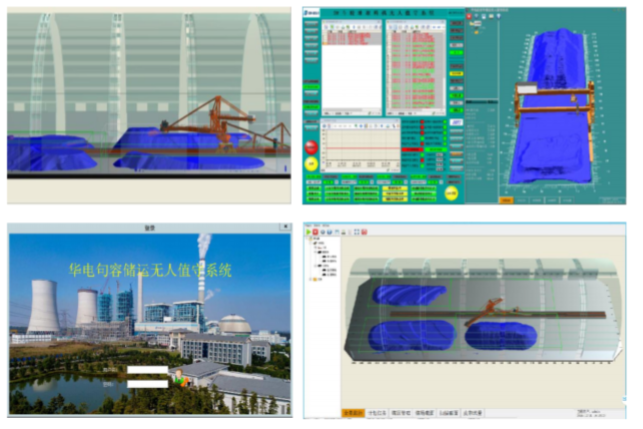
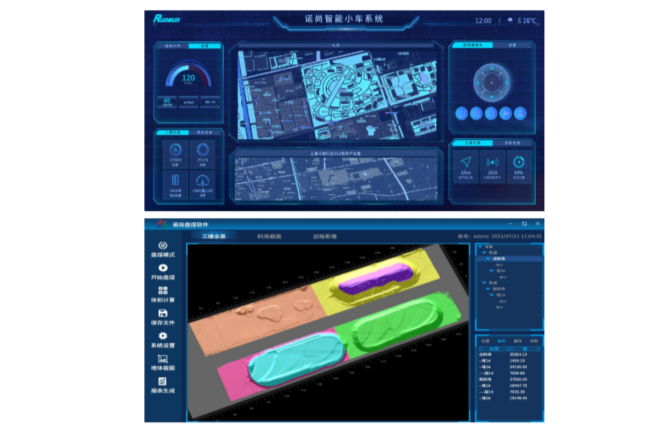
圆形堆取料机无人值守系统由多个功能模块组成,旨在实现散货料场堆料与取料作业的自动控制。系统涵盖激光扫描模块、料位检测模块、斗轮机定位识别模块、安全防护模块、无线通信模块、高精度视频监控模块、软件架构以及程控PLC控制模块。激光扫描模块负责实时获取料堆的三维形态数据,为自动化操作提供空间支持。料位检测模块利用雷达传感器测量设备与物料之间的距离,辅助判断设备负荷及料堆高度,确保操作精确。斗轮机定位识别模块采用格雷母线编码技术,实现机械定位的准确识别,保障动作协调。安全防护模块配备紧急停止装置及毫米波、超声波雷达,用于防止设备碰撞并保障人员安全。无线通信模块搭建稳定网络环境,支持远程视频监控与数据传输,确保系统响应及时。高精度视频监控模块覆盖关键设备部位,提供运行状态监控。软件架构采用客户端/服务器模式,结合三维图形绘制与数据处理,实现料场数字化仿真与控制。程控PLC控制模块作为指令中心,将作业计划转化为具体控制命令,协调各模块的协作运行。上海诺尚信息技术有限公司依托行业经验和自主研发能力,结合完善的服务体系,已为多家煤矿及电厂客户提供定制化无人值守系统,助力提升生产效率与安全管理水平。浙江堆取料机无人值守系统工矿企业检测仿真处理技术在堆取料机无人值守系统中模拟实际煤场操作,优化取料方案并提高设备运行效率。
斗轮机定位识址堆取料机无人值守系统的安装流程是确保设备运行精确与稳定的关键环节。安装工作始于对大机轨道长度及平整度的确认,轨道外侧需满足电子磁尺的安装条件,保证其与行走方向保持平行。采用T/L型夹具固定电子磁尺,调整非接触间隙至水平30至300毫米、垂直0至50毫米,确保感应信号的正常传递。终端箱和始端箱分别固定于电子磁尺两端,信号线整齐连接以维护传输的稳定性。电磁发射器需安装在适宜位置,距离格雷母线控制在30至300毫米范围内,确保磁场均匀覆盖。编码器柜和读码器分别装配于行走台车机构,编码器利用嵌入式主板读取循环二进制码,实现发射头位置的精确解析,读码器将解码数据转换为4-20mA模拟信号,传送至PLC模拟量块以实现实时定位反馈。整个安装过程注重精度与稳定性的协调,细微偏差均可能影响定位结果,进而影响堆取料机的自动寻址功能。上海诺尚信息技术有限公司凭借丰富的行业经验,制定了详尽的安装规范和技术指导,确保所提供的斗轮机定位识址系统能在煤矿、火电厂及大型料场环境中稳定运行,支持客户迈向智能无人值守的转型升级。
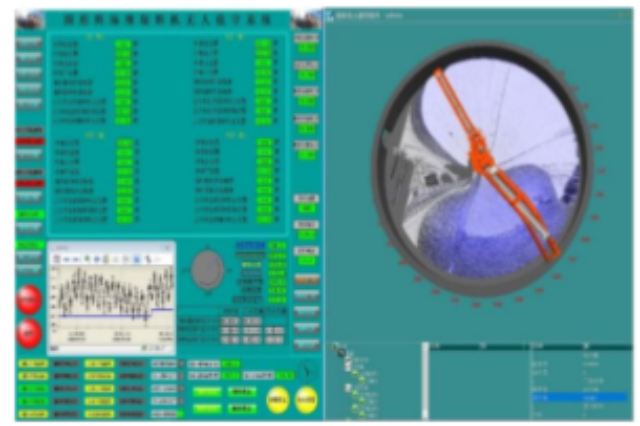
悬臂防撞堆取料机无人值守系统的操作依赖于PLC控制指令的准确传递和执行。PLC系统接收中控平台制定的堆取料作业计划,将其转化为具体的指令,控制堆取料机的各个机械部件。系统首先利用激光扫描仪对料堆进行实时的三维扫描,采集详细的几何信息,随后中控系统对这些数据进行分析,确定料堆特征及作业路径。PLC根据处理结果,计算出悬臂的俯仰角度、回转角度以及大车的起始位置。通过与绝对值编码器或格雷母线定位系统反馈的位置数据进行比对,PLC发出电机旋转方向和速度的指令,实现精确的定位和动作控制。此流程使堆料机能够自动完成悬臂的仰回转动作,取料机则能准确移动至指定取料点并调整刮板角度,完成自动取料。系统中还集成了超声波雷达和毫米波雷达的信号处理逻辑,针对防撞需求,PLC能够根据检测到的障碍物信号及时发出停止或调整动作的指令,减少设备碰撞风险。上海诺尚信息技术有限公司自2005年成立,专注于智能信息技术集成,面向煤矿和火电行业提供无人值守解决方案。公司开发的PLC控制系统结合激光扫描、定位识别及安全防护技术,支持堆取料机自动化作业的精确控制与安全管理,助力企业提升生产效率并降低运营风险。堆取料机无人值守系统具备自动化取料和智能预警功能,缓解人力不足问题,提高生产连续性与安全运行水平。
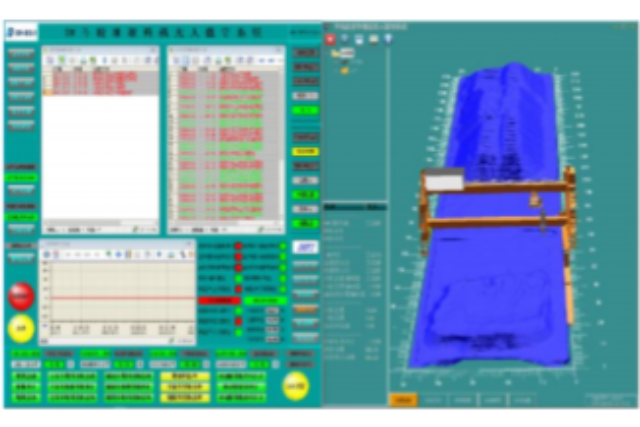
自动作业堆取料机无人值守系统的软件架构设计强调高效的数据处理与实时控制的紧密结合。系统采用面向对象的开发模式,基于C/S架构,使用C++语言构建,运行于Windows平台。三维图形部分利用OpenGL图形库,支持料堆及堆取料机动态三维模型的流畅渲染。系统通过TCP/IP Socket与激光扫描设备实现数据交换,GPS及角度位移编码器通过以太网连接,串口服务器则扩展了通讯能力,确保多种设备数据能够实时传输与处理。ActiveX控件封装了3D绘图功能,便于调用与跨平台应用。软件内部设计了自定义数据地图模式,对扫描数据进行归一化处理,使扫描点得到准确分类,动态反映料堆形态变化。界面允许调整网格密度,以平衡图形细节与系统运行效率,避免系统负载过高。整体架构融合了工业自动化与数字孪生技术,支持多机协同作业及防冲撞逻辑,保障无人值守环境下的稳定与安全。上海诺尚信息技术有限公司提供包括数字化料场无人值守系统在内的多项智能解决方案,凭借专业团队和完善服务,诺尚致力于成为煤矿电力行业智能化进步的可靠合作伙伴。检测功能使堆取料机无人值守系统自动识别异常工况,及时反馈状态,减少停机风险并保障安全运行。江苏堆取料机无人值守系统自动堆料工作原理
堆取料机无人值守系统结合PLC控制指令实现设备智能联动,确保自动化作业流程高效顺畅。高精度视频监控激光扫描堆取料机无人值守系统
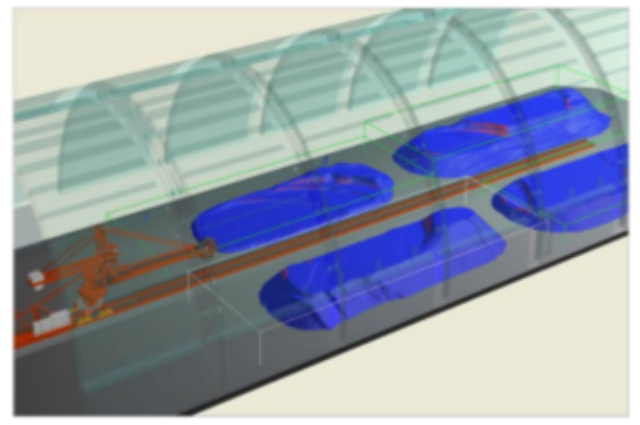
实时扫描技术在半门式堆取料机无人值守系统中扮演着重要角色。系统在门架顶部两侧安装了高精度激光扫描仪,通过扇形扫描的方式动态捕捉料堆形态,确保数据采集的速度与准确性。激光扫描仪垂直向下的安装设计有效减少了盲区,提升了数据的完整性和稳定性,同时维护工作较为简便,设备寿命较长。扫描获得的原始数据经过处理后,生成三维模型和料堆信息数据库,形成数字孪生,实现料堆形态的实时可视化与更新。借助这些数据,系统自动计算堆取料机的作业路径和动作参数,支持设备精确定位和操作。该技术为料堆管理提供了科学依据,也为自动控制系统奠定了数据基础,促进了作业效率和安全性的提升。上海诺尚信息技术有限公司自2005年成立,专注于智能信息技术与工业物联网的融合,致力于为煤矿、火电厂及大型料场提供先进的无人值守系统。公司结合激光扫描、图像处理及PLC控制技术,打造了成熟的数字化料场自动化解决方案,助力客户提升生产效率和降低运营成本。高精度视频监控激光扫描堆取料机无人值守系统
上海诺尚信息技术有限公司汇集了大量的优秀人才,集企业奇思,创经济奇迹,一群有梦想有朝气的团队不断在前进的道路上开创新天地,绘画新蓝图,在上海市等地区的安全、防护中始终保持良好的信誉,信奉着“争取每一个客户不容易,失去每一个用户很简单”的理念,市场是企业的方向,质量是企业的生命,在公司有效方针的领导下,全体上下,团结一致,共同进退,**协力把各方面工作做得更好,努力开创工作的新局面,公司的新高度,未来上海诺尚信息供应和您一起奔向更美好的未来,即使现在有一点小小的成绩,也不足以骄傲,过去的种种都已成为昨日我们只有总结经验,才能继续上路,让我们一起点燃新的希望,放飞新的梦想!
智能堆取料系统的关键在于数据的精确采集与处理,尤其是在石化行业复杂的料场环境中。系统通过激光扫描装置对料堆进行扇形扫描,快速获取边界、堆高及堆宽等关键参数,进而建立高精度的三维数字模型。扫描数据经过归一化处理,按区域分类以动态反映料堆形态,保持与现场实际情况的高度一致。料位检测系统利用雷达传感器实时监控堆料高度,反馈设备负载信息,辅助自动调整作业节奏。斗轮机定位识别系统采用格雷母线定位技术,准确测量堆取料机的行走轨迹和姿态,确保路径执行的精确性。所有数据通过工业以太网传输至中控系统,结合PLC控制逻辑,实现自动寻址及动作指令下发。中控系统还支持防冲撞计算及多机协同调度,提升作业安全性与效率。视...
- 陕西堆取料机无人值守系统智能化软件架构 2026-07-01
- 陕西堆取料机无人值守系统条形控制台 2026-06-27
- 山东堆取料机无人值守系统智能化安装流程 2026-06-25
- 河北堆取料机无人值守系统悬臂防撞怎么操作 2026-06-24
- 广东堆取料机无人值守系统圆形实时控制 2026-06-23
- 山东堆取料机无人值守系统一体化哪家好 2026-06-22
- 河北堆取料机无人值守系统数字化多少钱 2026-06-22
- 上海堆取料机无人值守系统3D建模远程控制 2026-06-21
- 河南堆取料机无人值守系统悬臂防撞软件 2026-06-20
- 上海堆取料机无人值守系统刮板防撞的组成 2026-06-18


- 河南堆取料机无人值守系统数字化的优点 2026-06-11
- 北京堆取料机无人值守系统工业控制台 2026-06-10
- 石化行业的功能堆取料机无人值守系统 2026-06-08
- 山东堆取料机无人值守系统自动作业仿真处理 2026-06-07
- 河南堆取料机无人值守系统散货堆场控制台 2026-06-06
- 内蒙古堆取料机无人值守系统安全防护 2026-06-05

- 陕西堆取料机无人值守系统智能化软件架构 07-01
- 湖南室内轮式升降巡检机器人设备自检测 07-01
- 北京电气房轨道巡检机器人自主避障 07-01
- 浙江数字煤场管控系统温度监控功能 06-30
- 浙江电气房轨道巡检机器人语音协助的组成 06-30
- 广东工业安全监测系统发电集团工作原理 06-30
- 河北工业安全监测系统一体化的组成 06-30
- 河北地面轮式巡检机器人换流站监测参数 06-29
- 浙江的作用智能巡检系统 06-29
- 广东数字煤场管控系统自动盘煤软件 06-29