工程车作业范围大,驾驶员视觉盲区大,且现场噪音易导致其注意力分散、判断力降低,作业危险系数高,如何防患于未然、降低风险是主管部门的探索方向。由于工程车作业人员 95% 以上的环境和车辆状态信息通过视觉感知,因此解决工程车辆等安全问题、降低作业风险,应从提升视觉感知入手。佳兴伟诚工程车辆盲区防碰撞预警系统,基于视觉算法,专为工程车、渣土车等重型车辆设计。它通过 360 全景盲区预警系统、车载 AI 视觉摄像头、车内显示器、声光报警器,对靠近的行人、非机动车进行图像采集、智能识别和预警提示。当系统监测到车辆右侧有其他工程车辆或作业人员进入作业范围,车内显示器会立即放大右侧画面,辅助驾驶员提升视觉感知;若距离超过阈值,扬声器会触发声光预警。此外,随着车联网技术发展,除该系统外,还可通过异常驾驶行为监测预警、前方碰撞预警、车道偏离预警、紧急制动等系统,实现风险预知和主动干预,进一步保障工程车作业安全。工程车防碰撞预警系统具备强大的数据处理能力,能快速判断危险等级,以不同方式向司机传达预警信息。拉萨矿卡前向防碰撞预警方案

城市渣土车行驶路线复杂,常经过居民区、工地等区域,盲区多,事故率高。佳兴伟诚的城市渣土车防碰撞预警系统,专为解决这些问题而生。系统在渣土车的车头、车尾及两侧安装多组传感器,重点监测右侧盲区,因为这里是容易发生事故的区域。当有行人或非机动车进入右侧盲区,驾驶室内的右侧警示灯立即亮起,语音播报 “右侧有行人,注意避让”;若渣土车准备右转,系统会提前监测范围,对可能进入转弯轨迹的目标发出预警。系统还能记录渣土车的行驶轨迹和预警信息,便于管理部门监管,让渣土车在城市中安全行驶。乌鲁木齐汽车防撞防碰撞预警电话工程车防碰撞预警系统通过实时显示车辆与障碍物的距离,让司机直观了解当前安全状况。
工程机械车辆作业时,存在诸多安全隐患。其作业半径内驾驶员视觉盲区大,且作业环境中车辆噪音大、尾气污染严重,易导致驾驶员疲劳驾驶、注意力分散、判断力降低,还可能出现视线遮挡、超速作业回转等危险驾驶行为,严重威胁作业安全。随着影像识别和人工智能技术的发展,机器视觉识别能力不断提升。佳兴伟诚 IA 智能影像防撞预警系统应运而生,专为工程车辆设计,可实时侦测工作区域危险状态并警示,提升作业安全。该系统通过在车辆护顶架四周安装四颗 210 度 AI 识别摄像头,借助超高清画质和深度学习算法实现机器视觉识别,画面实时显示在屏幕上,方便司机查看。当有障碍物或人员进入危险区域,司机能通过屏幕收到动态防撞预警,有助于避免危险、预防事故、减轻司机压力,并提供多种辅助功能,有效提升车辆安全性能,守护人、车、物安全。
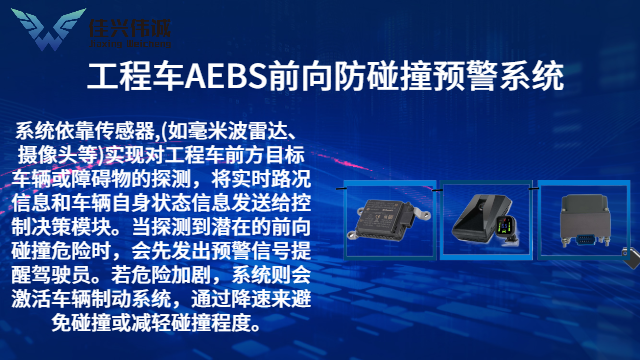
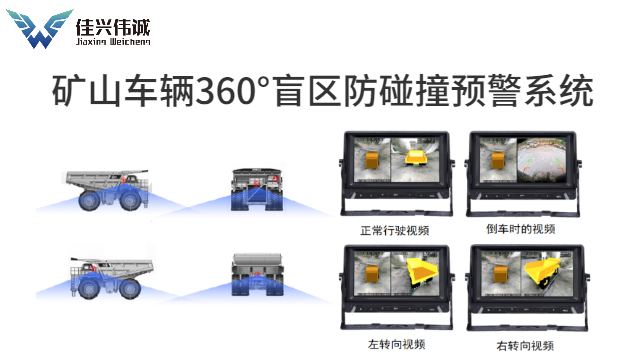
矿山作为一个高危行业,其安全问题一直备受关注。而在矿山生产中,部分露天矿区环境恶劣,飞沙很大,矿车运输车队前后车距看不清,所以矿山车辆的防碰撞问题尤为突出。因此,矿山车辆前向防碰撞预警系统的应用显得尤为重要。佳兴伟诚科技针对此现象研发出矿山车辆前向防碰撞预警,此系统通过超声波雷达对前方的障碍物进行实时监测,当发现有障碍物时,及时向驾驶员发出语音警报。提醒驾驶员降低车速从而来避免车距过近发生碰撞。相比传统的防碰撞手段,矿山车辆前向防碰撞预警系统具有响应速度快、准确度高等优点,能够更好地保障矿山运输车辆安全! 佳兴伟诚车辆防碰撞预警系统实时监测,智能预警,碰撞风险早知道。
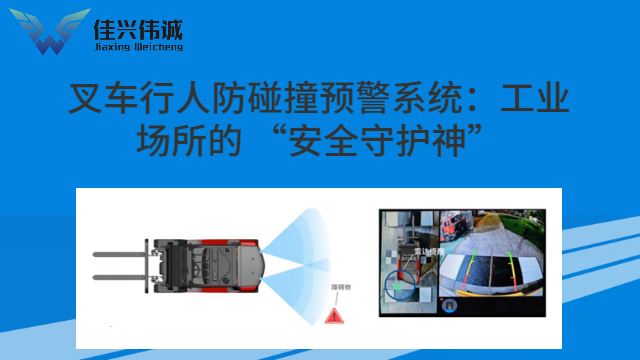
装载机、铲车、挖机等工程机械体型庞大,易产生视觉盲区。在光线差、噪声大的恶劣环境中,后视镜作用有限。尤其在水泥厂、混凝土公司,装载机露天作业,厂区粉尘多、噪音大、人多车多、人车交互密集;矿山厂区环境更差,昼夜温差大、矿尘多,视线受阻,加之其他工程机械多,装载机盲区复杂,易发生碾压事故,因此安装车辆防碰撞预警系统很有必要。随着 AI 视觉技术发展,佳兴伟诚科技将其融入 360 全景作业监控,实现 360 度工程车作业半径内人员智能识别,可做到 6 路 AI 视觉盲区检测。该系统搭配行人侦测摄像头,运用 AI 算法实时智能侦测车身周边及旋转半径内的作业人员,一旦侦测到,立即向司机发出警告,避免因视觉盲区引发意外,且无需额外摄像头。此系统可实现车外声光警报、车内蜂鸣器 + 语音播报功能,通过自有算法,结合全景 AI 影像(360)和盲区检测(BSD),形成车辆 360 度无死角的作业半径安全辅助系统,还支持四路 360 环视 + 额外两路摄像头接入,满足多种车载监控需求。依靠人工智能技术的工程车防碰撞预警系统,能不断学习和适应新的驾驶场景,持续提升预警性能。吐鲁番机场工程车防碰撞预警多少钱
大型车辆BSD盲区防碰撞预警系统,实时监控车辆周边,为驾驶员提供可靠“电子眼”。拉萨矿卡前向防碰撞预警方案
车辆360全景盲区防碰撞预警系统智能目标识别也是其优势。通过 AI 算法,系统能够准确区分 “行人”“固定障碍物”“移动车辆” 等不同目标,减少了误报情况。例如,在复杂的施工场地中,它能够判断哪些是真正具有危险的移动物体,而排除树木、土堆等非危险目标,避免驾驶员因频繁误报而产生困扰,从而更专注于应对实际的危险情况。实时性强是该系统的又一特点。从图像采集到预警响应的延迟时间小于 200ms,这对于工程车辆在低速作业(0 - 30km/h)时的实时监控需求来说,至关重要。在挖掘机回转、装载机卸料等瞬间,系统能够迅速捕捉到周围环境的变化,并及时发出预警,为驾驶员争取宝贵的反应时间,有效避免碰撞事故的发生。拉萨矿卡前向防碰撞预警方案