- 品牌
- 美驱
- 型号
- 齐全
动静态缺相保护:指在电机运行状态时,电动车电机任意一相发生断相故障时,控制器实行保护,避免造成电机烧毁,同时保护电动车电池、延长电池寿命。功率管动态保护功能:控制器在动态运行时,实时监测功率管的工作情况,一旦出现功率管损坏的情况,控制器马上实施保护,以防止由于连锁反应损坏其他的功率管后,出现推车比较费力的现象。防飞车功能:解决了无刷电动车控制器由于转把或线路故障引起的飞车现象,提高了系统的安全性。若相位角不匹配,电机可能出现抖动、噪音甚至反转等问题。梁溪区智能电动车控制器平台
针对电动自行车使用实际情况,出现堵转是可能出现的工况之一,如控制器能对输出端短路进行可靠保护,那么在电机堵转条件下,控制器同样可以进行保护,并可保护电机及蓄电池的安全。如果只具有限流功能的控制器,此时将输出大电流(如限流14A),这些使蓄电池(容量为12AH)处于大电流放电状态下(14A),将影响蓄电池的使用寿命。另外,大电流流经电机绕组,时间一长,将使电机温升上升,导致绕组绝缘老化,轻则影响电机寿命,重则烧毁电机。梁溪区标准电动车控制器结构设计根据自己的电动车车型和需求选择合适的控制器类型。

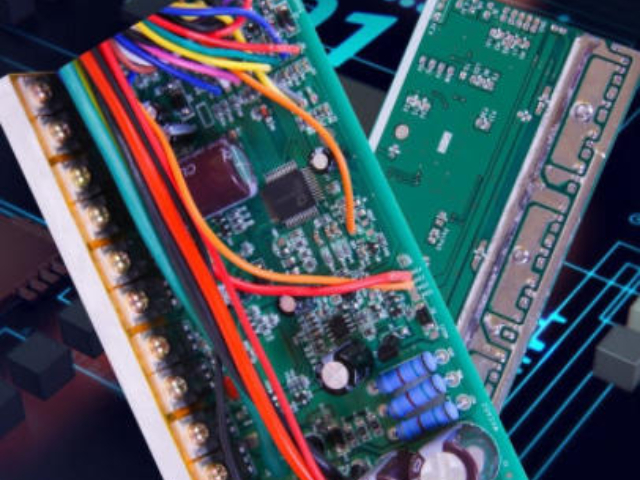
二:当电动车无刷控制器完全没有输出时1、参照无刷电机控制器主相位检查测量图,用万用表直流电压+50V档,检测6路MOS管栅极电压是否与转把的转动角度呈对应关系。 [1]2、如没有对,表示控制器里的PWM电路或MOS管驱动电路有故障。控制器3、参照无刷控制器主相位检查图,测量芯片的输入输出引脚的电压是否与转把转动角度有对应关系,可以判断哪些芯片有故障,更换同型号芯片即可排除故障。三:当电动车有刷控制器控制部件的电源不正常时1、电动车控制器内部电源一般采用三端稳压集成电路,一般三端 稳压集成电路,它们的输出电压分别是5V、6V、12V、15V。
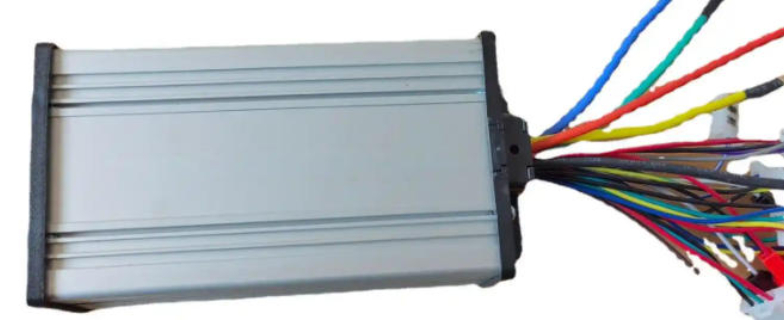
电动车控制器是电动车中一个重要的组件,主要负责控制电动机的运行和电池的管理。它的主要功能包括:电机控制:控制电动机的启动、停止、加速和减速,确保电动车的平稳行驶。能量管理:监测电池的电量,优化能量的使用,延长电池的使用寿命。保护功能:提供过流、过压、过温等保护,防止电动车在异常情况下损坏。通讯功能:与其他电子设备(如显示屏、传感器等)进行数据交换,提供实时信息。模式切换:根据不同的驾驶需求,切换不同的工作模式(如经济模式、运动模式等检测电机堵转状态,2秒内将电流限制在10A以下,防止绕组过热。

并且刹车、减速或下坡滑行时将EABS产生的能量反馈给电池,起到反充电的效果,从而对电池进行维护,延长电池寿命,增加续行里程,用户可根据自己的骑行习惯自行调整EABS刹车深度。电机锁系统:在警戒状态下,报警时控制器将电机自动锁死,控制器几乎没有电力消耗,对电机没有特殊要求,在电池欠压或其他异常情况下对电动车正常推行无任何影响。自检功能:分动态自检和静态自检,控制器只要在上电状态,就会自动检测与之相关的接口状态,如转把,刹把或其它外部开关等等,一旦出现故障,控制器自动实施保护,充分保证骑行的安全,当故障排除后控制器的保护状态会自动恢复。它控制着电机的启动、运行、调速与停止,更通过精密的算法与保护机制,确保车辆安全高效运行。江苏使用电动车控制器品牌
电动车控制器主要采用PWM(脉宽调制)控制机理,利用高频开关功率器件(如MOS管)来实现开关调制。梁溪区智能电动车控制器平台
在传统的控制单元开发流程中,通常采用串行开发模式,即首先根据应用需要,提出系统需求并进行相应的功能定义,然后进行硬件设计,使用汇编语言或C语言进行面向硬件的代码编写,随后完成软硬件和外部接口集成,***对系统进行测试标定。整车控制器,尤其是纯电动车控制器,其整车控制器研发多采用V模式开发流程。软硬件技术的不断发展,为并行开发提供了强有力的工具。第一步,功能定义和离线仿真。首先根据应用需要明确控制器应该具有的功能,为硬件设计提供基础;然后基础Matlab建立整个控制系统的仿真模型,并进行离线仿真,运用软件仿真的方法设计和验证控制策略。梁溪区智能电动车控制器平台
无锡美驱科技有限公司在同行业领域中,一直处在一个不断锐意进取,不断制造创新的市场高度,多年以来致力于发展富有创新价值理念的产品标准,在江苏省等地区的电子元器件中始终保持良好的商业口碑,成绩让我们喜悦,但不会让我们止步,残酷的市场磨炼了我们坚强不屈的意志,和谐温馨的工作环境,富有营养的公司土壤滋养着我们不断开拓创新,勇于进取的无限潜力,美驱供应携手大家一起走向共同辉煌的未来,回首过去,我们不会因为取得了一点点成绩而沾沾自喜,相反的是面对竞争越来越激烈的市场氛围,我们更要明确自己的不足,做好迎接新挑战的准备,要不畏困难,激流勇进,以一个更崭新的精神面貌迎接大家,共同走向辉煌回来!
- 无锡应用电动车控制器专卖店 2026-02-01
- 新吴区标准电动车控制器专卖店 2026-02-01
- 梁溪区智能电动车控制器哪家好 2026-02-01
- 滨湖区质量电动车控制器结构设计 2026-02-01
- 徐州使用电动车控制器品牌 2026-02-01
- 梁溪区应用电动车控制器结构设计 2026-01-31
- 无锡标准电动车控制器哪家好 2026-01-31
- 江苏常见电动车控制器专卖店 2026-01-31
- 宜兴特点电动车控制器专卖店 2026-01-30
- 南京标准电动车控制器现价 2026-01-30
- 宜兴使用电动车控制器专卖店 2026-01-30
- 滨湖区使用电动车控制器专卖店 2026-01-30