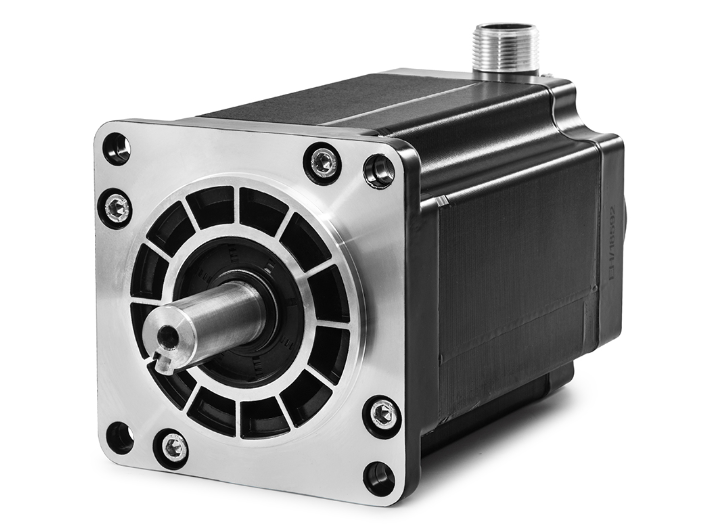
步进电机温度过高首先会使电机的磁性材料退磁,从而导致力矩下降甚至于丢失。因此电机外表允许的较高温度应取决于不同电机磁性材料的退磁点。一般来说,磁性材料的退磁点都在130摄氏度以上,因此步进电机外表温度在80~90摄氏度完全正常。常见问题:噪声大。解决方法:如步进电机正好工作在共振区,可通过改变减速比提高步进电机运行速度。采用带有细分功能的驱动器,这是较常用的,较简便的方法。因为细分型驱动器电机的相电流变化较半步型平缓。换成步距角更小的步进电机,如三相或五相步进电机,或两相细分型步进电机。换成直流或交流伺服电机,几乎可以完全克服震动和噪声,但成本较高。在电机轴上加磁性阻尼器,市场上已有这种产品,但机械结构改变较大。配件模块化设计,便于机械自动化升级维护。河南铝型自动化配件生产
伺服驱动器的工作原理是通过数字信号处理器(DSP)作为控制中心,实现复杂的控制算法,实现数字化、网络化和智能化。驱动器的功率器件通常采用智能功率模块(IPM)设计的驱动电路。IPM内部集成了驱动电路,并具有过电压、过电流、过热、欠压等故障检测保护电路。此外,驱动器还加入了软启动电路,以减小启动过程对驱动器的冲击。 在伺服驱动器的主回路中,首先通过三相全桥整流电路对输入的三相电或市电进行整流,得到相应的直流电。然后,经过整流后的直流电通过三相正弦PWM电压型逆变器变频来驱动三相永磁式同步交流伺服电机。整个过程可以简单地描述为AC-DC-AC的过程。 整流单元(AC-DC)采用的主要拓扑电路是三相全桥不控整流电路。这种电路能够将输入的三相交流电转换为直流电,并通过控制开关管的导通和关断来实现对输出电压的调节。 PWM逆变器(DC-AC)则通过控制开关管的开关频率和占空比来产生三相正弦波形的交流电压,从而驱动伺服电机。这种方式可以实现对电机速度、位置和力矩的精确控制。 总之,伺服驱动器通过DSP控制中心和功率驱动单元实现对伺服电机的精确控制,使其能够按照预定的算法和参数进行运动控制。重庆传动自动化配件大概多少钱自动化配件,提升生产线灵活性。
传感器的主要特性之一是灵敏度。灵敏度是指传感器在稳态工作情况下输出量变化△y对输入量变化△x的比值。它可以通过输出一输入特性曲线的斜率来表示。如果传感器的输出和输入之间呈线性关系,则灵敏度S是一个常数。否则,它将随着输入量的变化而变化。灵敏度的量纲是输出量和输入量的量纲之比。 举例来说,如果某位移传感器在位移变化1毫米时,输出电压变化为200毫伏,那么它的灵敏度应该表示为200毫伏/毫米。当传感器的输出量和输入量具有相同的量纲时,灵敏度可以理解为放大倍数。 提高传感器的灵敏度可以获得更高的测量精度。然而,灵敏度越高,测量范围就越窄,稳定性也往往较差。因此,在选择传感器时,需要根据具体的应用需求来平衡灵敏度、测量范围和稳定性之间的关系。 除了灵敏度,传感器的其他重要特性还包括线性度、分辨率、响应时间、温度特性等。这些特性的综合考虑可以帮助选择适合特定应用的传感器,并确保测量结果的准确性和可靠性。
传感器按用途分类:压力敏和力敏传感器、位置传感器、液位传感器、能耗传感器、速度传感器、加速度传感器、射线辐射传感器、热敏传感器。按原理:振动传感器、湿敏传感器、磁敏传感器、气敏传感器、真空度传感器、生物传感器等。按输出信号:模拟传感器:将被测量的非电学量转换成模拟电信号。数字传感器:将被测量的非电学量转换成数字输出信号(包括直接和间接转换)。膺数字传感器:将被测量的信号量转换成频率信号或短周期信号的输出(包括直接或间接转换)。开关传感器:当一个被测量的信号达到某个特定的阈值时,传感器相应地输出一个设定的低电平或高电平信号。机械自动化配件伺服驱动器使用是伺服驱动器在当今比较重要的技术课题。

传感器动态特性,是指传感器在输入变化时,它的输出的特性。在实际工作中,传感器的动态特性常用它对某些标准输入信号的响应来表示。这是因为传感器对标准输入信号的响应容易用实验方法求得,并且它对标准输入信号的响应与它对任意输入信号的响应之间存在一定的关系,往往知道了前者就能推定后者。较常用的标准输入信号有阶跃信号和正弦信号两种,所以传感器的动态特性也常用阶跃响应和频率响应来表示。线性度:通常情况下,传感器的实际静态特性输出是条曲线而非直线。在实际工作中,为使仪表具有均匀刻度的读数,常用一条拟合直线近似地实际的特性曲线、线性度(非线性误差)就是这个近似程度的一个性能指标。拟合直线的选取有多种方法。如将零输入和满量程输出点相连的理论直线作为拟合直线;或将与特性曲线上各点偏差的平方和为较小的理论直线作为拟合直线,此拟合直线称为较小二乘法拟合直线。自动化配件,优化机械运行稳定性。河南铝型自动化配件生产
自动化配件,助力准确制造。河南铝型自动化配件生产
步进电机的相数是指电机内部的线圈组数,常用的有二相、三相、四相、五相步进电机。电机相数不同,其步距角也不同,一般二相电机的步距角为1。8度、三相为1。2度、五相的为0。72度。在没有细分驱动器时,用户主要靠选择不同相数的步进电机来满足步距角的要求。如果使用细分驱动器,则相数将变得没有意义,用户只需在驱动器上改变细分数,就可以改变步距角。步进电机精度:一般步进电机的精度为步进角的3~5%。步进电机单步的偏差并不会影响到下一步的精度,因此步进电机误差不累积。河南铝型自动化配件生产