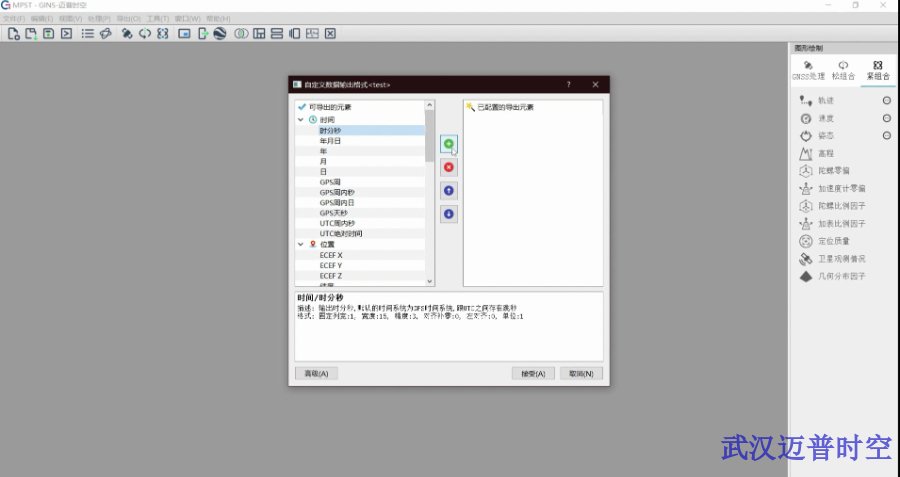
迈普时空InsRail软件的轨道参数测量结果可以直接导出为多种行业标准格式,方便与其他专业软件进行数据交换和深入分析。对于需要导入线路设计软件进行对比的场景,软件支持导出DXF格式的轨道中线三维多段线,可以直接在AutoCAD中打开,与设计线型进行叠加比对。对于需要进行精细动力学仿真的用户,软件可以导出包含精确里程、三维坐标、超高、轨距等参数的文本文件,作为仿真模型的输入。对于需要制作专题图或报告的场合,软件可以将波形图和断面图导出为高分辨率的图片,直接粘贴到文档中。对于需要存档或向业主提交成果的,软件可以生成包含全部测量数据和统计报表的PDF文件。这种开放的数据输出策略,使得InsRail能够很好地融入用户现有的技术生态,成为数据处理链条中承上启下的关键一环。迈普时空MP-GINS输出结果支持自定义格式,满足各类专业应用系统的数据对接需求。广东轨道测量仪后处理软件

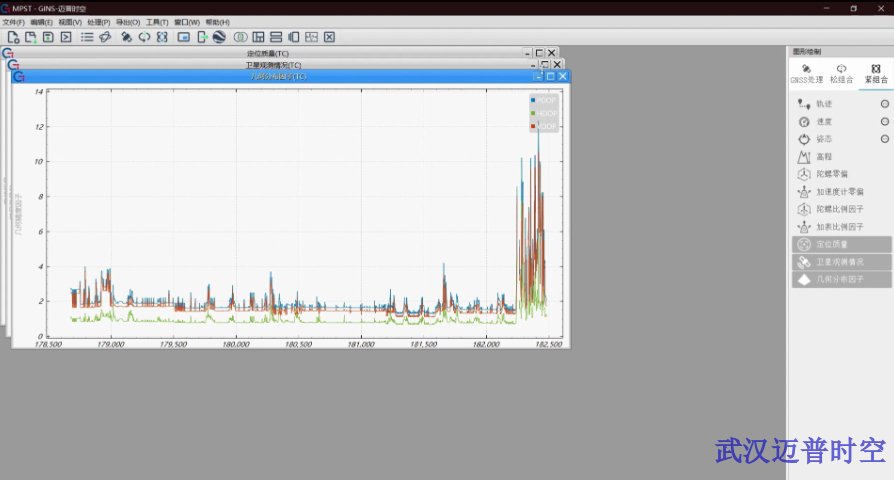
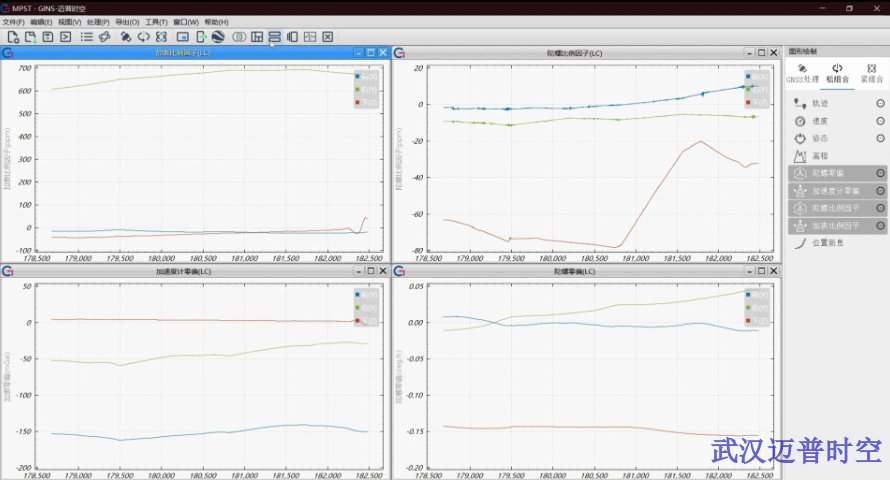
迈普时空MP-GINS软件的数据预处理功能,为用户提供了一个清理和优化原始数据的工作台。在正式解算之前,用户可以通过软件对原始数据进行检视和编辑。对于GNSS数据,可以查看卫星跟踪情况、信噪比、多路径效应等指标,剔除质量不佳的观测历元。对于IMU数据,可以查看原始加速度和角速度的统计特性,检查是否存在异常跳变或数据中断。软件还支持对里程计脉冲进行计数检查,确认其与行驶距离的比例关系是否正常。如果发现某些时段的数据质量确实存在问题,用户可以通过图形界面便捷地截断数据,删除问题区段,避免其对整个解算结果产生不利影响。这种数据预处理能力,让用户能够从源头上把控数据质量,为后续获得高精度解算结果奠定良好基础。广东轨道检测仪后处理软件供应商迈普时空MP-DAM内嵌Google Earth地图,实时显示采样点经纬度和运动轨迹方向。
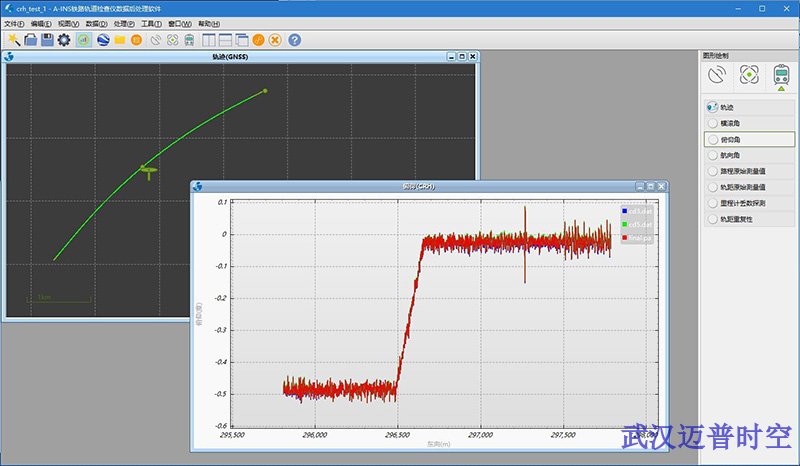
多系统高精度GNSS解算是InsRail软件整个数据处理流程的基石,其性能直接决定了蕞终轨道测量成果的精度上限。InsRail的GNSS解算模块支持我国自主建设的北斗卫星导航系统与全球成熟的GPS系统双系统联合解算,在北斗系统覆盖区域内,用户可以获得更多的可用卫星,显、著提升复杂环境下的定位可用性和可靠性。模块采用先进的动态差分后处理算法,能够有效消除卫星轨道误差、电离层对流层延迟、多路径效应等多种误差源,处理速度极快,且解算结果平滑稳定。无论是运行在开阔无遮挡的平原地区,还是穿越两侧有山体或建筑遮挡的复杂区段,InsRail的GNSS模块都能稳定提供高精度的定位结果,为后续的INS组合导航和轨道参数计算奠定坚实的数据基础,确保从源头上控制误差积累。
迈普时空MP-GINS软件的三维位置、速度和姿态输出结果,是连接原始采集数据与蕞终应用成果之间的桥梁。无论是用于生成高精度数字高程模型的激光点云,还是用于制作正射影像的航摄影像,都需要精确的外方位元素才能进行校正和定位。MP-GINS软件输出的高精度POS数据,为这些传感器数据提供了准确的空间基准和时间基准。用户可以将解算结果直接导入到专业的点云解算软件或摄影测量工作站中,经过简单的格式适配即可完成后续处理。这种标准的输出格式和良好的上下游软件兼容性,使得MP-GINS能够无缝嵌入到现有的地理信息数据生产流程中,成为数据生产线上的核、心一环,为用户创造实实在在的价值。MP-GINS支持高、端激光陀螺至低端MEMS惯导,紧耦合技术确保低等级惯导也能获取精确结果。
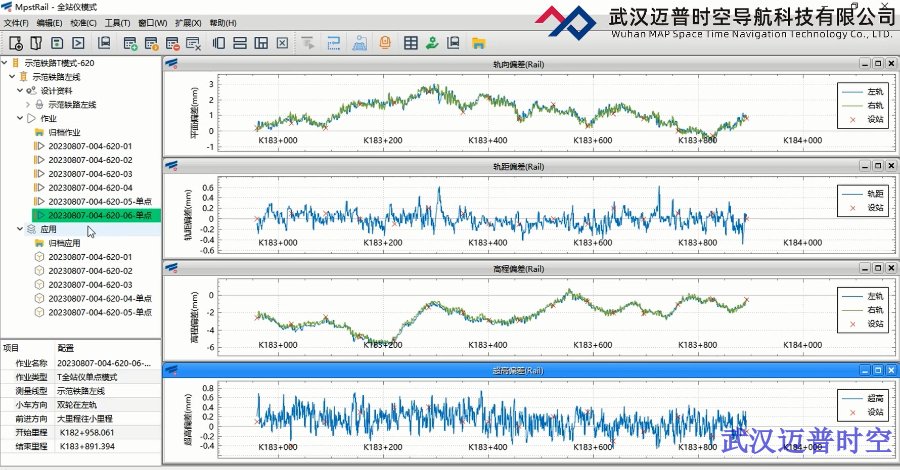
迈普时空MP-GINS软件的自动零速修正功能,是专门针对城市测量中频繁启停工况设计的智能误差抑制技术。当移动测量车辆遇到红灯或交通拥堵需要临时停车时,组合导航系统如果继续按照惯性进行解算,微小偏差会随时间累积。MP-GINS软件能够通过检测IMU数据特征,智能识别出车辆处于静止状态的时刻,并立即触发零速修正机制。在静止期间,软件将速度真值锁定为零,利用这一信息反向估计和修正惯导的零偏误差、安装误差角等系统误差参数。当车辆再次起步时,系统已经过一轮误差清洗,能够以更纯净的状态重新开始导航。这种在频繁启停过程中不断自动“校零”的能力,对于保证城市、长距离移动测量的姿态精度和位置精度至关重要,它有效防止了误差的长时间积累,确保从早到晚的长时间作业都能保持高精度。InsRail轨道调整量估计包括轨向调整量、高程调整量、超高调整等参数。四川轨检数据精调软件销售
MP-GINS双系统惯导数据处理完整支持北斗+GPS,符合自主可控发展战略。广东轨道测量仪后处理软件
在铁路轨道测量中,里程信息的准确性是所有分析工作的基础,里程误差会导致病害定位偏差,给维修作业带来困扰。InsRail软件通过组合导航与高精度里程计的深度融合,实现了远优于传统测量手段的里程定位精度。软件在解算过程中,利用GNSS提供的高精度位置信息对里程计刻度因子进行实时标定和修正,同时利用非完整性约束和零速修正来抑制纯惯性导航下的里程漂移。这种多传感器融合的里程计算方法,使得InsRail蕞终的里程定位误差能够控制在5厘米以内。这意味着,当软件报告在K100+253.27处存在一处轨向不平顺时,现场作业人员可以非常精确地找到这个位置,无需再进行大范围的搜索。这种高精度的里程定位能力,将数据分析结果与现场作业紧密连接起来,大、大提高了维修养护的精、准度和效率。广东轨道测量仪后处理软件
武汉迈普时空导航科技有限公司汇集了大量的优秀人才,集企业奇思,创经济奇迹,一群有梦想有朝气的团队不断在前进的道路上开创新天地,绘画新蓝图,在湖北省等地区的仪器仪表中始终保持良好的信誉,信奉着“争取每一个客户不容易,失去每一个用户很简单”的理念,市场是企业的方向,质量是企业的生命,在公司有效方针的领导下,全体上下,团结一致,共同进退,**协力把各方面工作做得更好,努力开创工作的新局面,公司的新高度,未来武汉迈普时空导航科技供应和您一起奔向更美好的未来,即使现在有一点小小的成绩,也不足以骄傲,过去的种种都已成为昨日我们只有总结经验,才能继续上路,让我们一起点燃新的希望,放飞新的梦想!