三维扫描仪的精度是衡量其性能的关键指标,通常分为微米级(0.1-10μm)、亚毫米级(0.1-1mm)与毫米级(1-10mm)三类。微米级设备(如接触式三坐标测量机)适用于精密加工(如半导体、光学元件)的质量检测,其精度可达0.1μm,但效率低且对环境振动敏感;亚毫米级设备(如激光跟踪仪、工业级结构光扫描仪)是工业制造的主流选择,可满足汽车、航空航天等领域的需求,其精度与速度平衡性较佳;毫米级设备(如消费级手持扫描仪、摄影测量系统)适用于文化遗产、建筑等对精度要求相对较低的场景,其优势在于便携性与成本。选择扫描仪时需综合考虑测量对象尺寸、表面材质(反光、透明等)、环境条件(光照、温度)及预算,例如,扫描反光金属表面需选择激光扫描仪并配合喷粉处理,而扫描大型建筑则需激光扫描仪与无人机摄影测量结合。三维扫描仪在教育中用于虚拟现实的教学和学习。四川激光三维扫描仪厂家联系方式

三维扫描仪是一种能够捕获现实世界物体的三维几何数据的设备。通过激光、结构光或立体视觉等技术,三维扫描仪可以快速准确地获取物体表面形状,并将其转化为数字化模型。这些模型可用于逆向工程、质量检测、虚拟现实等多个领域。三维扫描技术的发展极大地提升了工业设计与制造的效率与精度。三维扫描仪的工作原理基于不同的物理现象,如激光测距、结构光编码、立体视觉匹配等。其中,激光扫描是较常用的一种方法。它通过发射一束或一系列激光脉冲,并测量这些脉冲从物体表面反射回来所需的时间来确定距离。而结构光扫描则是利用投影仪将特定的光栅或条纹图案投射到物体表面,然后通过分析这些图案的变形来计算出物体的三维坐标。四川激光三维扫描仪厂家联系方式在电影特殊效果中,三维扫描用于创建逼真的特殊效果场景。

数据采集是三维扫描仪工作的一步。理想的光源应该具有高亮度、窄带宽等特点,以便于精确测量。传感器的选择也很重要,CCD和CMOS是常用的两种类型。此外,为了提高采集速度和精度,还需考虑扫描路径规划和多视图融合等问题。例如,手持式扫描仪需要用户根据物体形状设计合理的扫描路线,以确保覆盖所有重要细节。数据处理是将采集到的原始数据转化为有用信息的过程。这通常包括数据预处理、特征提取、配准融合等多个步骤。数据预处理主要是去除噪声和冗余数据;特征提取则是提取物体表面的关键特征;配准融合则是将多视角数据组合成一个完整模型。这些步骤需要借助计算机算法来完成,以确保数据的一致性和完整性。
三维扫描仪的硬件只完成数据采集,后续的点云处理、模型重建与分析依赖专业软件。主流软件(如Geomagic、PolyWorks、CloudCompare)通常包含四大功能模块:数据预处理(去噪、滤波、拼接)、点云配准(将多视角数据对齐至同一坐标系)、模型重建(生成NURBS曲面或网格模型)与检测分析(对比CAD模型计算偏差、生成检测报告)。例如,在汽车检测中,软件可自动识别关键特征点(如孔位、边缘),计算其与理论位置的偏差,并生成彩色误差云图直观展示问题区域;在文化遗产保护中,软件支持纹理映射,将高分辨率照片贴合至3D模型,还原文物真实色彩与细节。此外,部分软件(如MeshLab、Blender)还提供模型修复、简化与优化功能,为3D打印或虚拟展示做准备。三维扫描仪在灾害评估中用于快速重建灾区的三维模型。

使用三维扫描仪进行测量时,通常需要先进行设备校准,以确保测量的准确性。然后设置测量参数,如扫描范围、分辨率和扫描速度等。开始进行扫描后,数据会被实时捕获并传输到计算机上进行后续处理和分析。整个操作流程简单明了,用户只需按照说明书进行操作即可。扫描得到的三维数据需要进行一系列处理,包括数据清洗、去噪、对齐和拼接等。这些处理步骤对于提高模型的精度和质量至关重要。通过专业的数据处理软件,用户可以对数据进行编辑、优化和可视化等操作,以满足不同的应用需求。工程项目中,三维扫描用于施工前的精确测量。四川激光三维扫描仪厂家联系方式
三维扫描仪支持多传感器融合,提升数据采集稳定性。四川激光三维扫描仪厂家联系方式
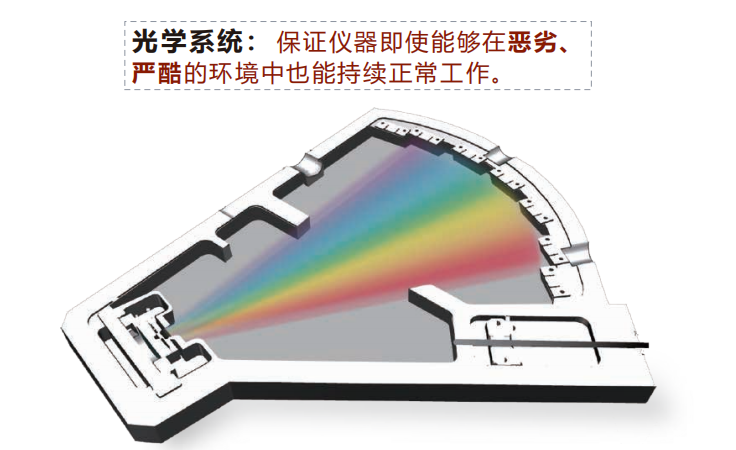
精度是三维扫描仪的关键指标,其水平受硬件性能、环境因素与算法优化共同影响。硬件层面,激光扫描仪通过提升激光功率与接收器灵敏度,延长有效测量距离(如从50米扩展至200米);结构光扫描仪采用更高分辨率的投影仪与相机(如4K级),将点间距缩小至0.05mm以下。环境因素中,温度、振动、光照是主要干扰源:例如,高温会导致激光波长漂移,影响距离计算;强光会降低结构光图案对比度,增加解码误差。为此,设备通常配备温度补偿模块(如恒温激光腔)与抗振结构(如碳纤维机身),并在软件中集成环境自适应算法:例如,根据光照强度动态调整投影图案亮度,或通过多帧平均抑制振动噪声。算法层面,点云配准是关键:传统ICP(迭代较近点)算法易陷入局部较优解,而全局配准算法(如基于特征点或分支定界)可提升多视角数据对齐精度;此外,深度学习技术被用于误差预测:例如,训练神经网络识别点云中的异常值(如飞点、重叠点),自动修正测量结果,将整体误差控制在0.02mm以内。四川激光三维扫描仪厂家联系方式