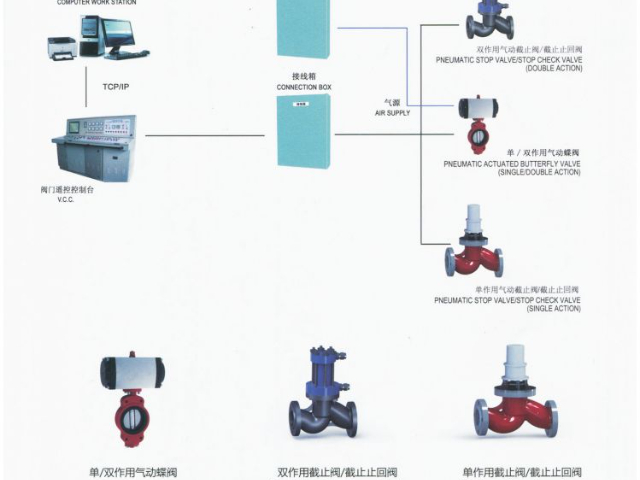
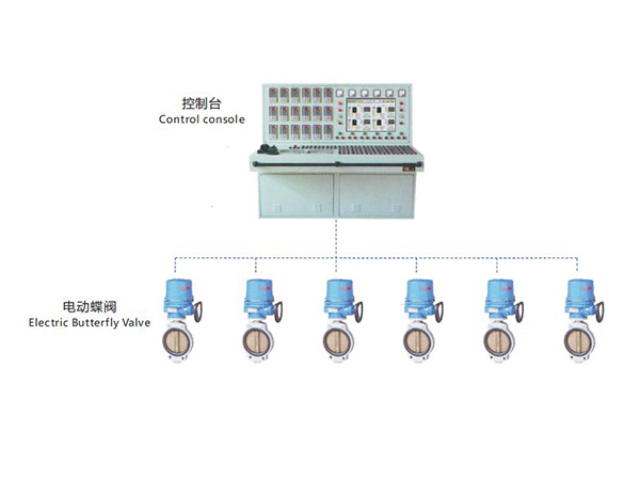
- 品牌
- 宏智铭,升泰电气
- 型号
- 齐全
船用雷达物位计的发展呈现出以下几个方面的趋势:
技术改进方面:更高的测量精度:随着电子技术和信号处理技术的不断进步,船用雷达物位计的测量精度在逐步提高。例如,采用更先进的信号处理算法、更高频率的雷达波以及更灵敏的接收装置等,能够更准确地测量物位信息,满足船舶对货物液位、舱底水位等精确测量的需求。更强的抗干扰能力:船舶上存在多种电磁干扰源,如通信设备、发动机等。未来的船用雷达物位计会通过优化滤波电路设计、采用抗干扰材料以及改进天线设计等方式,进一步提高抗干扰能力,确保在复杂的船舶环境中稳定工作。多参数测量与融合:除了物位测量,未来的雷达物位计可能会集成更多的传感器,实现对温度、压力等其他参数的同时测量,并将这些参数进行融合分析,为船舶的运营管理提供更多的信息。
功能拓展方面:智能化与自动化、适应复杂工况、无线通信功能
应用领域拓展方面:在新船型上的应用、在船舶维护与检修中的应用
市场竞争与产业发展方面:市场需求增长、产业整合与升级 无锡宏智铭科技的雷达物位计物美价优,欢迎您的来电哦!台州调频雷达雷达物位计

利用软件和信号处理技术解决 80G 调频雷达物位计的测量盲区问题
智能信号处理算法:许多先进的 80G 调频雷达物位计配备了智能信号处理算法。这些算法可以对接收的反射信号进行分析和处理,过滤掉可能来自盲区或者干扰源的虚假信号。例如,采用信号滤波算法,根据已知的盲区信号特征(如频率、强度、时间延迟等)来识别和排除这些信号。同时,通过对多次测量信号进行统计分析,如计算平均值、标准差等,能够更好地识别真实的物位反射信号,减少盲区信号的影响。有些雷达物位计还具有自适应算法,能够根据容器内的实际工况(如物料状态、搅拌速度等)自动调整信号处理参数。当检测到可能存在盲区干扰或者其他异常情况时,自适应算法可以动态地改变滤波参数、增益设置等,以优化信号处理过程,提高测量精度并减小盲区的影响。
设备校准和参数调整:定期对雷达物位计进行校准是减小盲区问题的重要措施。在设备安装完成后,要根据容器的实际尺寸、物料特性等参数进行初始校准。校准过程中,可以通过设置正确的测量范围、盲区补偿参数等来优化设备的性能。
铜陵RD80G04雷达物位计雷达物位计服务,就选无锡宏智铭科技,让您满意,欢迎新老客户来电!

合理的安装与维护可以有效提升雷达物位计的抗干扰能力
合理的安装与维护安装位置选择:尽量将雷达物位计安装在远离船舶上大型电磁设备(如大功率电机、通信天线等)的位置。例如,在船舶的燃油舱中,避免将其安装在靠近发动机舱壁的位置,因为发动机舱内有大量的电气设备会产生电磁干扰。同时,要考虑液体的流动特性,将其安装在液体相对平稳的区域。对于液货船的液货舱,安装在舱体中心位置附近可以减少液体波动和船舶晃动对测量的影响。注意安装高度和角度。确保雷达物位计的天线垂直于被测液体表面,这样可以获得很强的反射信号。定期使用干净的软布和适当的清洁剂擦拭外壳和天线,保持其清洁,防止这些物质对信号传输产生不良影响。例如,盐雾中的盐分可能会腐蚀天线表面,降低天线的性能,定期清洁可以及时去除盐分。检查设备的连接线路。船舶的振动可能会导致线路松动或者损坏,定期检查线路是否牢固,接口是否正常。对于松动的线路及时进行紧固,对于损坏的线路及时更换,确保信号传输的稳定性。同时,检查设备的接地是否良好,良好的接地是保证电磁屏蔽效果的关键因素之一。
80G雷达物位计采用调频连续波(FMCW)技术。天线发射高频的调频雷达信号,雷达信号的频率线性增加。发射的雷达信号经被测量介质反射后由同—天线接收。在同—时刻,发射信号频率与接收信号频率的频率差与被测距离成正比。采集到的频率差信号,经快速傅里叶变换(FFT)得到反射回波的频谱,并以此计算得出待测目标的距离
特点:1.毫米波雷达,测量精度比较高可达±2mm,测量盲区为0.05m。2.更小的天线尺寸,满足了更多的工况场合测量。3.多种透镜天线,更小的发射角,更集中的能量,回波信号更强,同等工矿条件下,相比于其他雷达产品具有更高的可靠性。4.拥有更强的穿透性,在有粘附及凝结的情况下也可以正常使用。5.动态信号范围更大,对于低介电常数介质的测量更加稳定。多种测量模式,快速测量模式下雷达反应 无锡宏智铭科技是一家专业提供雷达物位计服务的公司,期待您的光临!

如何在软件上提高船用雷达物位计的抗干扰能力?
改进软件算法
信号滤波算法:采用数字滤波技术,如有限 impulse 响应(FIR)滤波和无限 impulse 响应(IIR)滤波。FIR 滤波可以设计成线性相位滤波器,对信号进行精确的滤波处理,去除特定频率的干扰信号。通过在雷达物位计的信号处理软件中加入这些滤波算法,可以对接收的反射信号进行实时滤波,提高信号的质量。运用自适应滤波算法。由于船舶在不同的航行状态和环境下,干扰信号的频率和强度会发生变化,自适应滤波算法能够根据实际情况自动调整滤波器的参数。
数据处理算法:采用数据融合技术。船用雷达物位计可以同时采集多个数据点,如不同时间点的物位测量值或者不同角度下的反射信号强度。通过数据融合算法,将这些数据进行综合处理。例如,使用卡尔曼滤波算法,它可以根据前一时刻的测量值和当前时刻的测量值,结合系统的状态方程和测量方程,对物位数据进行比较好估计。在船舶晃动导致液体波动的情况下,这种数据融合算法能够有效地去除波动引起的虚假信号,得到更准确的物位值。运用统计分析算法。
无锡宏智铭科技可供应雷达物位计。瑞昌RD80G02雷达物位计
宏智铭科技致力于提供专业的雷达物位计,有需求可以来电咨询!台州调频雷达雷达物位计
雷达物位计和雷达液位计工作原理细节差异(基于测量对象特点)
雷达物位计(针对固体):当测量固体物料时,由于固体表面的不规则性(比如块状固体的形状各异、颗粒状固体的堆积角度不同等),电磁波反射情况较为复杂。雷达物位计发射的电磁波会在固体物料表面产生漫反射。它需要更复杂的信号处理算法来过滤掉杂散的反射信号,以准确识别出真正来自物料表面的反射信号,从而确定物位。例如,在测量一堆形状不规则的矿石时,不同矿石块的反射波相互交织,雷达物位计要通过算法分析来找出有效的反射信号来计算物位。
雷达液位计(针对液体):液体表面相对较为平整光滑,电磁波反射相对规则。雷达液位计发射的电磁波在液体表面会产生镜面反射。信号处理相对简单,主要是准确测量发射波和反射波之间的时间差来计算液位高度。例如,在一个装满水的水箱中,雷达液位计发射的电磁波在水面上产生规则的反射,更容易被接收和处理来确定液位。 台州调频雷达雷达物位计

船用调频雷达物位计的应用场景船舶液舱液位测量:燃油舱、淡水舱、压载水舱、化学品液舱船舶货舱物位监测:散货船货舱、集装箱船的冷藏集装箱液位船用特殊舱室物位测量:污水舱:船舶在运行过程中会产生各种污水,如生活污水、舱底污水等。船用调频雷达物位计可以测量污水舱的液位,提醒船员及时处理污水,避免污水舱满溢,防止对海洋环境造成污染。消防水舱:消防水舱的液位对于船舶的消防安全至关重要。通过船用调频雷达物位计的实时监测,船员可以随时掌握消防水的储备情况,确保消防系统在紧急情况下能够正常工作。无锡宏智铭科技致力于提供雷达物位计服务,有想法的不要错过哦!马鞍山调频雷达物位计定价船用雷达物位计的硬件故障排除电源问...
- 北海RD80G04雷达物位计 2026-06-15
- RD80G02雷达物位计定价 2026-06-15
- 钦州RD80G雷达物位计 2026-06-15
- 防城港RD80G01雷达物位计 2026-06-15
- 重庆RD80G雷达物位计 2026-06-13
- 湛江雷达物位计 2026-06-13
- 防城港RD80G05雷达物位计 2026-06-12
- 宜昌船用雷达物位计物位计 2026-06-12
- 汕头RD80G04雷达物位计报价 2026-06-12
- 南通船用调频雷达物位计 2026-06-12


- 南通RD80G05雷达物位计 2026-05-06
- 台州RD80G03雷达物位计 2026-05-05
- 莆田RD80G02雷达物位计准确 2026-05-05
- 株洲RD80G06雷达物位计 2026-05-05
- 都昌RD80G04雷达物位计 2026-05-04
- 漳州RD80G01雷达物位计 2026-05-04



- 重庆液位遥测监测报警系统报价 06-16
- 马鞍山调频雷达物位计定价 06-16
- 马鞍山阀门遥控系统产品 06-15
- 北海RD80G04雷达物位计 06-15
- RD80G02雷达物位计定价 06-15
- 苏州阀门遥控系统定价 06-15
- 浙江阀门遥控系统多少钱 06-15
- 钦州RD80G雷达物位计 06-15
- 防城港RD80G01雷达物位计 06-15
- 重庆RD80G雷达物位计 06-13