不同场景尺寸选择差异:实验室近距离定标(距离 1-3m,视场角 30°),选 0.5m×0.5m-1m×1m 的小型定标板,便于收纳与操作;自动驾驶户外定标(距离 5-10m,视场角 60°),选 2m×2m-3m×3m 的中型定标板,兼顾便携性与覆盖范围;环境监测远距离定标(距离 50-100m,...
激光雷达定标板基本参数
- 品牌
- 广州瑞科光电
- 型号
- 齐全
- 类型
- 激光雷达定标板
- 规格
- 波长:200-2500nm;反射率:1%-99%
- 加工定制
- 是
- 厂家
- 广州瑞科光电科技有限公司
- 产地
- 广州
激光雷达定标板企业商机
激光雷达传感测量通常包含距离和强度两个信息。人们所说的强度信息是从物体表面反射的强度。进行物理分析时,强度由三个因素决定:物体的反射率、距离、入射角。通过校正雷达强度,使同一种传感器具有相同反射率的路标值,从而保证了同一种目标的强度值。为解决这一问题,利用传感器对参考物体表面的强度特性,估计物体表面的反射率,采用Ostu阈值方法对道路标线进行提取,验证了校准结果的可行性。用于道路标志检测的典型车载传感器主要为照相机和激光雷达。照相机要便宜许多,而且获得道路信息也很方便。但是,照相机更易受光线影响,在一些场景中难以或精确地测量信息。激光雷达可以得到更为精确的距离信息。激光雷达定标板是精确测量和校准激光雷达系统的重要工具。50%反射率激光测距板厂家

激光雷达定标板有哪些应用领域?①无人驾驶距离校准&标识测试;②激光测距标准板;③环光源均匀性分布测试;④激光目标板;⑤相机均匀性测试;⑥光学反射器;⑦激光目标定位;⑧遥感目标;⑨背光照明;⑩模拟靶标。激光雷达定标板特点如下:激光雷达(LIDAR)是一种用脉冲激光对目标物反射脉冲返回时间来丈量距离。防水不掉灰,测量数据准确,反射率可从1%-99%可定制,尺寸在10mm-3000mm之间均可定制生产,均具有近乎完美的朗伯特性和稳定性,使激光雷达校准得到较佳的测试效果。背光照明用激光雷达标定板在恶劣环境下,使用激光雷达定标板需考虑温度、湿度和机械负载等因素。

激光雷达标定板无人驾驶定标:激光雷达由发射系统、接纳系统、信息处置三局部组成:激光器将电脉冲变成光脉冲发射进来,光接纳机再把从目的反射回来的光脉冲复原成电脉冲,经过一系列算法来得出目的位置(间隔和角度)、运动状态(速度、振动和姿势)和外形,能够探测、辨认、分辨和跟踪目的。激光雷达由发射系统、接纳系统、信息处置三局部组成:激光器将电脉冲变成光脉冲发射进来,光接纳机再把从目的反射回来的光脉冲复原成电脉冲,经过一系列算法来得出目的位置(间隔和角度)、运动状态(速度、振动和姿势)和外形,能够探测、辨认、分辨和跟踪目的。
ADAS系统自动驾驶感知车载激光雷达定标板应用:智能驾驶技术一般可分为感知、决策、执行三个环节。线控底盘则是高阶层自动驾驶汽车执行环节的载体,线控底盘主要包括线控制动、线控转向、线控悬架、线控油门等系统部件。相较人工驾驶的普通汽车,智能网联汽车技术依赖于感知的输入、计算模型以及道路场景数据,需要通过大量的道路测试来不断的训练自动驾驶的场景遍历性。道路测试和示范应用可以验证车辆在限定区域范围内的实际运行能力和人机交互能力,还可以提升公众对于自动驾驶技术的认知度和信赖感,为即将到来的智能网联汽车自动驾驶功能规模化应用奠定基础,是智能网联汽车技术研发和迭代升级过程中不可逾越的步骤。具备城市复杂道路的全无人驾驶能力的无人驾驶汽车,有方向盘和没有方向盘两个模式,配备8颗激光雷达,不同于以往人们在马路上见到的自动驾驶改装车,较为惹眼的是,主驾驶座上没有方向盘时,人们坐在车里可以办公、K歌、打游戏,一边前往目的地。通过使用自动化激光雷达定标板识别系统,可提高生产线的效率和灵活性。

激光雷达定标板——雷达极点分布的目标识别:目标的白然谐振频率又称为目标极点,激光雷达定标板,极点和散射中心分别是在谐振区和光学区建立起来的基本概念。目标极点分布只决定丁目标形状和固有特性,与雷达的观测方向〈目标姿态)及雷达的极化方式无关,因而给雷达目标识别带来了很大方便。目标极点的概念出现于1971年。1975年,Blaicum等首先提出了直接从一组瞬态响应时城数据来提取目标惜点的prony方法,使用提呶出的目标枝点作为目标特征,而通过将提取到的目标极点与目标库的目标极点进行匹配完成目标识别过程。80年代以来,关于目标极点的研究主要集中在如何提高算法本身的抗噪能力和估算精度方面。提取目标极点的函数束法(POF〉以及广义函数束法〈GPOF)等,80%激光雷达定标板,在极点的估计精度以及抗噪能力方面均优于Prony法。激光雷达定标板可以应用于无人驾驶距离测试。广州智能机器人-激光雷达定标板定制
激光雷达定标板在无人驾驶汽车中的应用为其安全行驶提供了重要保障。50%反射率激光测距板厂家
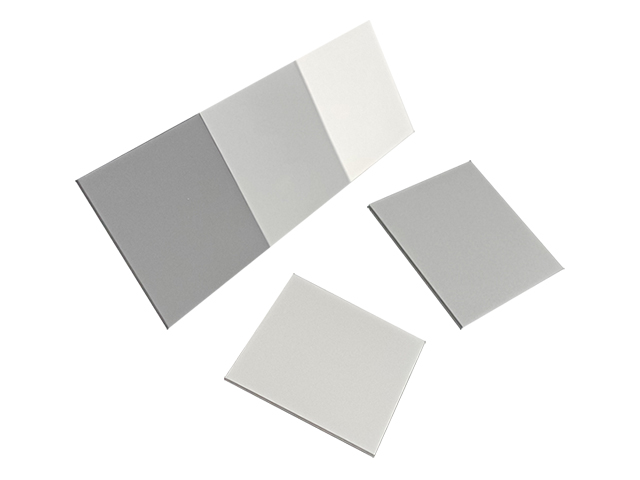
车载激光雷达测试板有哪些应用?有什么好处?现阶段无人驾驶汽车的人工智能主要细分技术包括,计算机视觉与深度学习。同时以传感器以及高速芯片、GPU等为主的硬件发展也是无人驾驶领域研发的重要板块。无人驾驶是智能化的体现,集中运用了计算机、现代传感,信息融合、通信、人工智能及自动控制等及技术,是典型的高新技术综合体。随着无人驾驶技术的不断提高,无人驾驶汽车行业市场规模将会快速增长。无人驾驶能否实现安全驾驶很重要的一点就是激光雷达是否准确高速有效作业,激光雷达是一种用于准确获得三维位置信息的传感器,其在无人驾驶中的作用相当于人类的眼睛,能够识别道路信息。为了保证激光雷达的准确性,通常需要对其进行标定测试。根据测试距离选择相对应的标定板,通常采用10%、50%、90%三个低中高的反射率板来进行标定校准。如果需要标定精度更高的话,建议定制更多反射率(2-95%)。50%反射率激光测距板厂家
与激光雷达定标板相关的文章

空间遥感-激光雷达测试板费用
- 高准确性激光测距板厂家联系方式 2026-03-03
- 广州相机均匀性测试用激光雷达标定板生产厂家 2026-03-03
- 无人机多光谱标定板 2026-03-03
- 高反射率激光雷达测试板 2026-03-02
- 广州10%反射率激光雷达测试板优点 2026-03-02
- 低反射率激光测距板使用方法 2026-03-02
- 广州高准确性激光雷达标定板 2026-03-02
- 广州激光测距板优点 2026-03-01
- 广州防水激光雷达标定板生产厂家 2026-03-01
- 防水激光测距板 2026-03-01
- 相机均匀性测试用激光雷达定标板使用方法 2026-03-01
- 10%反射率激光雷达测试板厂家推荐 2026-02-28
与激光雷达定标板相关的产品



与激光雷达定标板相关的新闻
-
防水激光雷达测试板供应商推荐 2026-01-23 00:12:22激光雷达定标板在自动驾驶领域的应用在自动驾驶行业,激光雷达作为 “车辆眼睛”,其测量精度直接关系到行车安全,而激光雷达定标板则是保障这一精度的关键环节。在自动驾驶车辆的生产线上,每台激光雷达需通过定标板完成出厂前的精细校准:通过发射激光束至定标板,对比接收的反射光信号与预设标准值,调整雷达的发射功率...
-
广州低反射率激光测距板价钱 2026-01-23 01:01:38激光雷达定标板的反射率设计需满足 “多梯度覆盖” 与 “波长精细适配” 两大原则,才能校准激光雷达的反射率识别范围与波长响应特性。首先,反射率梯度需覆盖激光雷达的实际检测场景,常规定标板会设计 3-5 个反射率档位(如 10%、30%、50%、70%、90%),分别对应低反射率目标(如沥青路面、黑色...
-
广州相机均匀性测试用激光雷达定标板费用 2026-01-23 05:02:37太空探索领域的激光雷达实验,定标板是地面模拟测试的 “关键道具”。在航天器搭载的激光雷达研发过程中,需在地面模拟太空环境进行测试。定标板经过特殊处理,能在真空、高低温极端环境下保持稳定的反射性能。科研人员将定标板置于太空环境模拟舱内,让激光雷达进行扫描测试。通过定标板的标准数据,可验证雷达在极端条件...
-
广州黑白格激光测距板销售 2026-01-22 08:02:38环境监测激光雷达(如大气颗粒物监测、森林高度测量激光雷达)需在户外复杂环境下长期运行,定标板的作用是修正环境因素(如温度、湿度、灰尘)导致的测量偏差。以大气颗粒物监测为例,激光雷达通过发射激光束测量颗粒物的散射信号,若无定标板校准,湿度每增加 10% RH,颗粒物浓度测量误差可能增加 8%,长期使用...
与激光雷达定标板相关的问题
新闻资讯
产品推荐
-
光密度计-漫反射板
2026-03-16 -

上海工业石英光纤价格
2026-03-15 -
广州摄像头校准板费用
2026-03-15 -
湖南1500波长石英光纤供应商
2026-03-15 -
成都石英光纤应用
2026-03-15 -
积分球系统-漫反射标准板厂家推荐
2026-03-14 -
广州漫反射标准板定制
2026-03-14 -

漫反射板生产厂家
2026-03-14 -

光学实验设备-漫反射标准白板价格
2026-03-14