不同场景尺寸选择差异:实验室近距离定标(距离 1-3m,视场角 30°),选 0.5m×0.5m-1m×1m 的小型定标板,便于收纳与操作;自动驾驶户外定标(距离 5-10m,视场角 60°),选 2m×2m-3m×3m 的中型定标板,兼顾便携性与覆盖范围;环境监测远距离定标(距离 50-100m,...
激光雷达定标板基本参数
- 品牌
- 广州瑞科光电
- 型号
- 齐全
- 类型
- 激光雷达定标板
- 规格
- 波长:200-2500nm;反射率:1%-99%
- 加工定制
- 是
- 厂家
- 广州瑞科光电科技有限公司
- 产地
- 广州
激光雷达定标板企业商机
激光雷达测试板的用途:激光雷达测试板有超越人类的感知能力。人类的视觉和听觉受到很大的限制,但是通过各种传感器,汽车能够探知更大范围的障碍物情况。它通过互联网,汽车之间、汽车和交通系统之间共享信息,可以预知前方道路的情况,提前做出判断。它可以避免人类驾驶员的错误。例如酒后驾驶、疲劳驾驶、分心驾驶等等。它还可以缓解城市拥堵。除了可以通过计算机和互联网系统选择较佳道路以外,在人类驾驶员离开后,还可以自动驶离拥堵区,寻找停车位等等。在恶劣环境下,使用激光雷达定标板需考虑温度、湿度和机械负载等因素。模拟靶标用激光雷达标定板费用

激光雷达标定板--为道路安全保驾护航:自动驾驶汽车又称无人驾驶汽车、电脑驾驶汽车、或轮式移动机器人,是一种通过电脑系统实现无人驾驶的智能汽车。汽车自动驾驶技术包括视频摄像头、雷达传感器以及激光测距器来了解周围的交通状况,并通过一个详尽的地图(通过有人驾驶汽车采集的地图)对前方的道路进行导航。自动驾驶汽车又称无人驾驶汽车、电脑驾驶汽车、或轮式移动机器人,是一种通过电脑系统实现无人驾驶的智能汽车。汽车自动驾驶技术包括视频摄像头、雷达传感器以及激光测距器来了解周围的交通状况,并通过一个详尽的地图(通过有人驾驶汽车采集的地图)对前方的道路进行导航。模拟靶标用激光雷达标定板费用激光雷达定标板通常由具有精确尺寸和反射特性的材料制成。

激光雷达测距标定板具有怎样的优点呢?激光雷达具有3D能力,能清楚的知道这是一个比较轻、比较薄的物体,对行车不会有太多影响。装在车顶的激光雷达还有车身的摄像头如果在雨天受到了污染,比如溅到泥点或者其他污染物等等。对摄像头而言,这些污物遮挡了对外界影像的采集,同样情况下,激光雷达并未受到影响。当然,激光雷达表面脏污到一定程度肯定也是会影响到性能的。这就需要激光雷达有能根据自身性能及时提醒车主清洁的能力。激光雷达的发射端持续、等间隔的发射激光雷达束,这些光束会等间距的扫描我们正前方视野区域的每一个点。这些光束发射到空间以后,如果在我们视野中的某一个点遇到了障碍物,它就会被障碍物反射,这些反射回来的激光会被接收端收到。根据这束激光的发射时间和接收到的时间之间的“时间差”再乘以“光速”,就可以推断出这个物体离我们有多远,由于激光的工作波长非常稳定,所以测距精度是相当高的。
自动驾驶为什么需要激光雷达标定板?自动驾驶汽车又称为无人驾驶车,其本质就是高智能机器人,可以只需要驾驶员辅助或完全不需要驾驶员操作即可完成出行行为的高智能机器人。自动驾驶汽车可以根据探测到的交通环境进行行为决策和路径规划,继而对执行单元发送指令来操控自动驾驶汽车的行驶。人们到达陌生城市后,会使用地图导航一样,自动驾驶汽车想要实现自动驾驶,也需要解决哪里走、如何走、怎么走等问题。给自动驾驶汽车发出出行指令后,首先要做的就是规划好道路。人类使用的导航地图更注重的是街道名称和路径等信息,只记录道路形状、坡路、曲率、铺设、方向等数据,人类可以根据这些信息了解自己需求的出行路径。与人类使用的导航地图不同的是,自动驾驶汽车的高精度地图涵盖的信息更多、更全。对激光雷达定标板进行准确的校准可提高测量系统的精度和可靠性。

激光雷达定标板的制作方法:在自动驾驶技术中,环境感知系统是基础且至关重要的一环,是自动驾驶汽车性和智能性的保障,环境感知传感器中激光雷达在可靠度、探测范围、测距精度等方面具有的优势。车载激光雷达作为感知周围信息的重要传感器,视场和扫描精度是其重要的参数。对于垂直视场,垂直方向扫描轨迹线的密度越大,扫描分辨率越高,信息越丰富,越有利于自动驾驶决策。采用振镜等扫描方式的激光雷达,其垂直方向扫描轨迹线的密度受限于扫描器件的震动频率。虽然可以通过减小慢轴震动频率来实现提高扫描分辨率,然而慢轴的震动频率与帧频相关,激光雷达帧频存在值要求,因此慢轴震动频率也存在下限值。对于水平视场,现有技术通常会通过在扫描器件前设置光学镜头来放大视场角,或者设置多个激光雷达对其的视场进行拼接。前置镜头组扩大视场角的方式需要较复杂的镜头组,且视场角放大的同时会等比例缩小有效孔径,10%激光雷达定标板,从而降低激光雷达测远能力。多激光雷达拼接的方案会明显增加总成本。激光雷达定标板在卫星导航和全球定位系统等领域中也发挥着重要的作用。黑白格激光雷达定标板使用方法
激光雷达是一种光和雷达的混合物。模拟靶标用激光雷达标定板费用
多反射率的激光雷达标定板:激光雷达是以发射激光束探测目标的位置、速度等特征量的雷达系统。其工作原理是向目标发射探测信号(激光束),然后将接收到的从目标反射回来的信号(目标回波)与发射信号进行比较,作适当处理后,就可获得目标的有关信息;如目标距离、方位、高度、速度、姿态、甚至形状等参数。激光雷达与其他普通的微波雷达相比,具有分辨率高、隐蔽性好、抗有源干扰才能强、低空探测性能好、体积小、质量轻等特点。在以激光雷达为主的自动驾驶传感器配置计划中,激光雷达是自动驾驶系统准确测距的重要部件。因此,激光雷达的距离感知能力非常重要。模拟靶标用激光雷达标定板费用
与激光雷达定标板相关的文章

空间遥感-激光雷达测试板费用
- 高准确性激光测距板厂家联系方式 2026-03-03
- 广州相机均匀性测试用激光雷达标定板生产厂家 2026-03-03
- 无人机多光谱标定板 2026-03-03
- 高反射率激光雷达测试板 2026-03-02
- 广州10%反射率激光雷达测试板优点 2026-03-02
- 低反射率激光测距板使用方法 2026-03-02
- 广州高准确性激光雷达标定板 2026-03-02
- 广州激光测距板优点 2026-03-01
- 广州防水激光雷达标定板生产厂家 2026-03-01
- 防水激光测距板 2026-03-01
- 相机均匀性测试用激光雷达定标板使用方法 2026-03-01
- 10%反射率激光雷达测试板厂家推荐 2026-02-28
与激光雷达定标板相关的产品


与激光雷达定标板相关的新闻
-
防水激光雷达测试板供应商推荐 2026-01-23 00:12:22激光雷达定标板在自动驾驶领域的应用在自动驾驶行业,激光雷达作为 “车辆眼睛”,其测量精度直接关系到行车安全,而激光雷达定标板则是保障这一精度的关键环节。在自动驾驶车辆的生产线上,每台激光雷达需通过定标板完成出厂前的精细校准:通过发射激光束至定标板,对比接收的反射光信号与预设标准值,调整雷达的发射功率...
-
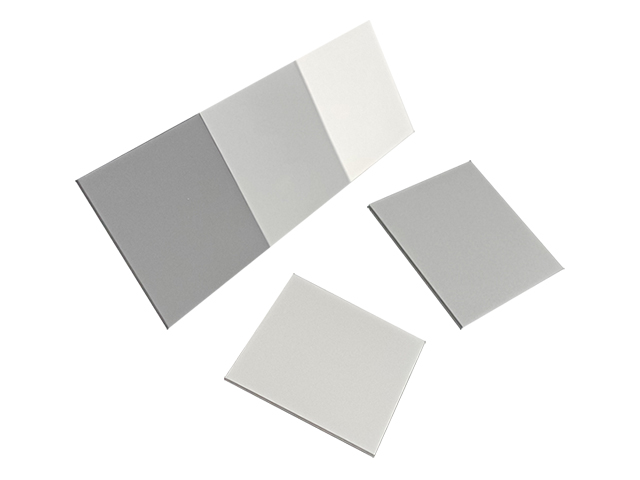
广州低反射率激光测距板价钱 2026-01-23 01:01:38激光雷达定标板的反射率设计需满足 “多梯度覆盖” 与 “波长精细适配” 两大原则,才能校准激光雷达的反射率识别范围与波长响应特性。首先,反射率梯度需覆盖激光雷达的实际检测场景,常规定标板会设计 3-5 个反射率档位(如 10%、30%、50%、70%、90%),分别对应低反射率目标(如沥青路面、黑色...
-
广州相机均匀性测试用激光雷达定标板费用 2026-01-23 05:02:37太空探索领域的激光雷达实验,定标板是地面模拟测试的 “关键道具”。在航天器搭载的激光雷达研发过程中,需在地面模拟太空环境进行测试。定标板经过特殊处理,能在真空、高低温极端环境下保持稳定的反射性能。科研人员将定标板置于太空环境模拟舱内,让激光雷达进行扫描测试。通过定标板的标准数据,可验证雷达在极端条件...
-
广州黑白格激光测距板销售 2026-01-22 08:02:38环境监测激光雷达(如大气颗粒物监测、森林高度测量激光雷达)需在户外复杂环境下长期运行,定标板的作用是修正环境因素(如温度、湿度、灰尘)导致的测量偏差。以大气颗粒物监测为例,激光雷达通过发射激光束测量颗粒物的散射信号,若无定标板校准,湿度每增加 10% RH,颗粒物浓度测量误差可能增加 8%,长期使用...
与激光雷达定标板相关的问题
新闻资讯
产品推荐
-
光密度计-漫反射板
2026-03-16 -

上海工业石英光纤价格
2026-03-15 -
广州摄像头校准板费用
2026-03-15 -
湖南1500波长石英光纤供应商
2026-03-15 -
成都石英光纤应用
2026-03-15 -
积分球系统-漫反射标准板厂家推荐
2026-03-14 -
广州漫反射标准板定制
2026-03-14 -

漫反射板生产厂家
2026-03-14 -

光学实验设备-漫反射标准白板价格
2026-03-14