- 品牌
- Psylotech
- 型号
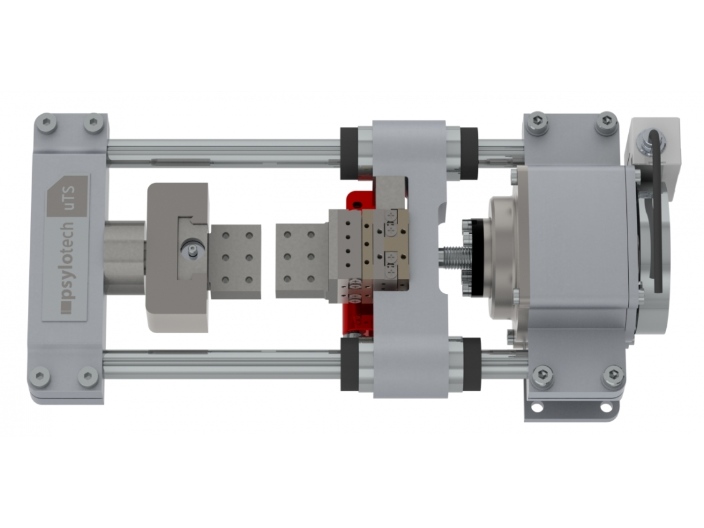
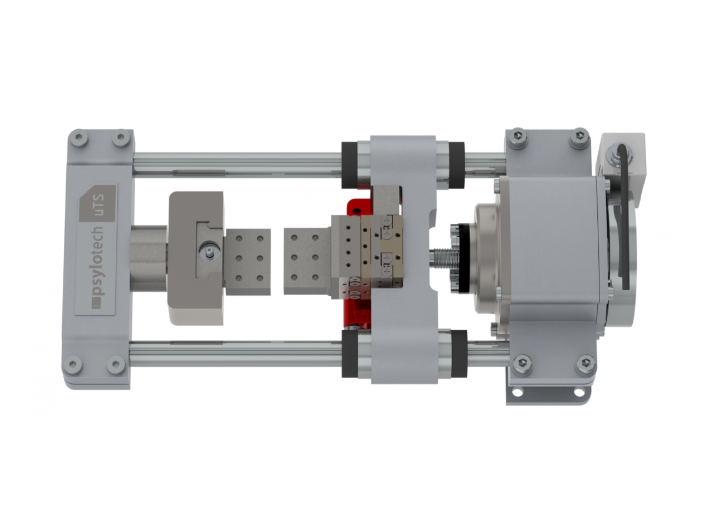
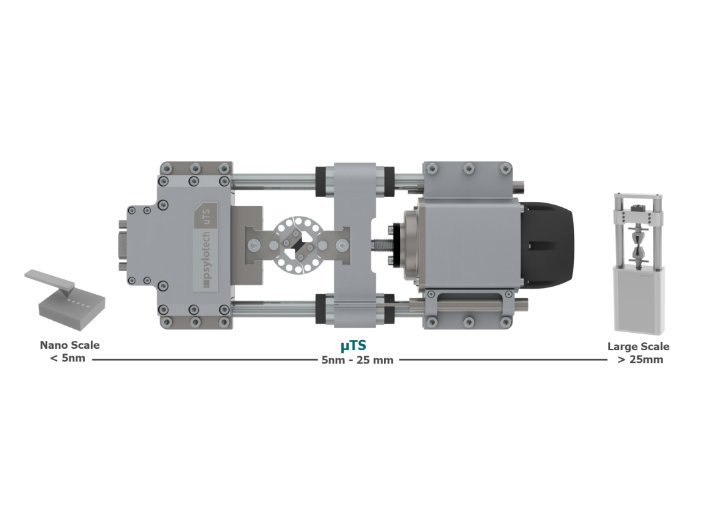
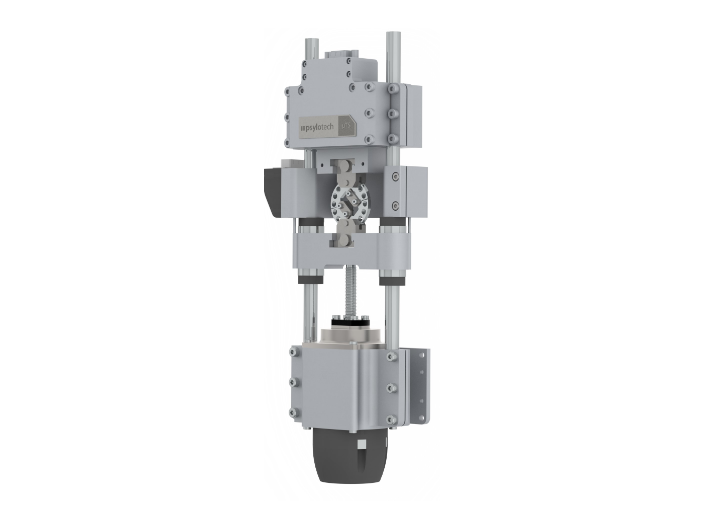
- μTS,xTS
xTS原位加载试验机是一种先进的测试设备,其应用领域普遍且多样。它主要用于材料和结构的力学性能测试,包括但不限于金属材料、复合材料、塑料、橡胶、陶瓷等。在航空航天领域,该试验机可用于测试飞机零部件、发动机组件的强度和耐久性。在汽车工业中,它可评估汽车零部件如发动机支架、悬挂系统的承载能力和疲劳寿命。此外,在建筑领域,xTS原位加载试验机也发挥着重要作用,用于检测建筑材料和结构如桥梁、钢筋混凝土构件的力学性能。同时,该试验机还可应用于电子、医疗器械、包装材料等行业,进行各种精密和微观的力学测试。其高精度和高效率的特点使得xTS原位加载试验机成为科研机构和实验室中不可或缺的测试工具,为产品研发和质量控制提供了有力支持。原位加载系统是一种动态编译技术,可以将字节码或解释代码即时编译成机器码。北京Psylotech系统销售公司
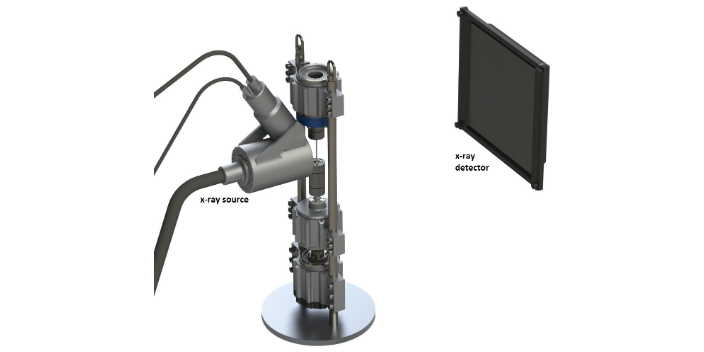
CT原位加载试验机是一种先进的材料测试设备,它在材料科学、工程领域以及相关的研究领域中具有普遍的应用。关于它是否支持多种试样尺寸和形状的问题,答案是肯定的。这款试验机设计之初就考虑到了不同研究需求下试样的多样性。因此,它不只能够适应不同尺寸的试样,还能处理各种形状的试样。无论是长条、圆形、方形还是其他不规则形状的试样,CT原位加载试验机都能通过其灵活的夹具和加载系统来实现精确、可靠的测试。此外,该试验机还具备高度可配置性,用户可以根据具体需求调整测试参数和加载方式,确保测试结果的准确性和可靠性。这种灵活性不只提高了设备的利用率,还扩展了其应用范围,使CT原位加载试验机成为材料测试领域不可或缺的重要工具。福建CT原位加载系统原位加载系统通过在设备的内部存储器中加载和运行操作系统和应用程序,提供更快的启动速度和更高的性能。
CT原位加载试验机的软件界面设计得非常友好,充分考虑到用户的操作习惯和视觉体验。其界面布局合理,功能区块划分清晰,图标与文字说明直观易懂,降低了用户的学习成本。同时,该软件还具备高度的可定制性,支持用户根据具体的测试需求,自定义测试程序。用户不只可以选择预设的测试模板,还能在软件中对测试流程、参数、加载方式等进行详细设定,甚至可以根据需要编写脚本,实现更复杂的测试逻辑。这种自定义测试程序的设计,极大地提高了试验机的灵活性和适用范围,满足了不同领域、不同场景下的测试需求。总的来说,CT原位加载试验机的软件界面不只友好易用,还支持高度的自定义功能,充分体现了设备的人性化设计和先进性,是用户进行材料性能测试的理想选择。
原位加载系统的精度和稳定性是评估其性能和可靠性的重要指标。一般来说,原位加载系统的精度和稳定性取决于以下几个方面:传感器精度:原位加载系统所使用的传感器的精度直接影响加载过程中测量到的力、位移等参数的准确性。高精度的传感器可以提高加载系统的测量精度。控制系统稳定性:原位加载系统的控制系统应该具备稳定的反馈控制机制,以确保在加载过程中能够及时、准确地对加载参数进行调节,避免系统出现不稳定或漂移的情况。结构设计和材料选择:原位加载系统的结构设计应该考虑载荷传递的均匀性和稳定性,避免因结构刚度不足或变形导致加载精度下降。同时,选用合适的材料也能提高系统的稳定性。校准和标定:定期对原位加载系统进行校准和标定是确保其精度和稳定性的重要手段。通过校准可以及时发现并修正系统中的误差,保证加载过程中数据的准确性。环境因素:原位加载系统在使用过程中受到的环境因素(如温度、湿度等)也会影响其精度和稳定性。因此,在操作时需注意环境控制,确保系统处于稳定的工作环境中。总的来说,一个高精度和稳定性的原位加载系统需要综合考虑传感器精度、控制系统稳定性、结构设计、校准标定等因素。 xTS原位加载试验机可以根据客户需求进行定制,满足特殊要求。
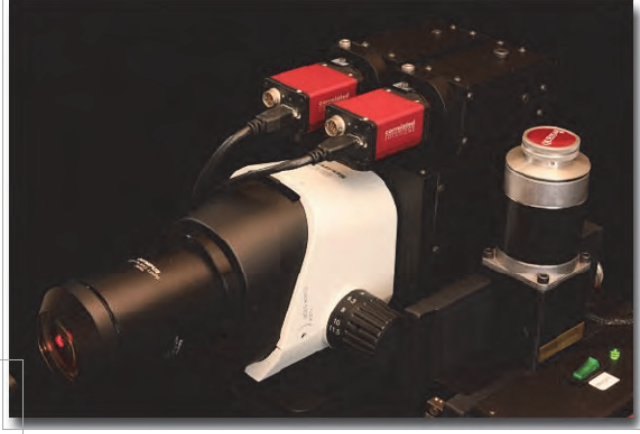
CT原位加载试验机,作为一种用于材料力学性能测试的高精度设备,其在测试过程中的数据采集频率是至关重要的参数。具体的数据采集频率并不是一个固定的数值,而是根据试验的具体需求、材料的性质以及试验机的性能等多个因素来决定的。通常,为了确保测试结果的准确性和可靠性,CT原位加载试验机会采用较高的数据采集频率。这样一来,即使在短暂的加载或变形过程中,试验机也能够捕捉到足够多的数据点,从而更精确地描述材料的行为。在实际应用中,数据采集频率可能达到每秒数十次甚至更高,以满足对材料细微变化的研究需求。然而,过高的采集频率也可能会导致数据冗余和处理负担增加,因此选择合适的数据采集频率是确保测试效率和精度的关键。原位加载系统能够实现纳米材料的原位观察,提供更真实和准确的数据。福建扫描电镜原位加载系统代理商
原位加载系统在机械工程中可用于精确控制机械臂的位置和操作。北京Psylotech系统销售公司
原位加载系统是一种用于实现物体的精确定位和加载的技术系统。它的工作原理基于先进的传感器和控制算法,能够实时监测和调整物体的位置和姿态,以确保准确的加载操作。原位加载系统通常由以下几个关键组件组成:传感器、控制器和执行器。传感器用于获取物体的位置和姿态信息,可以是光学传感器、惯性传感器或其他类型的传感器。控制器根据传感器提供的数据进行实时计算和决策,以确定加载操作的参数和路径。执行器负责实际的加载动作,可以是机械臂、气动装置或其他类型的执行器。
北京Psylotech系统销售公司
- 福建SEM原位加载系统哪里有卖 2026-03-17
- 山东扫描电镜原位加载设备价格 2026-03-17
- 海南扫描电镜原位加载试验机价格 2026-03-16
- 海南uTS原位加载试验机哪里有 2026-03-16
- 福建CT原位加载试验机多少钱 2026-03-15
- 海南Psylotech系统哪里有卖 2026-03-14
- xTS原位加载设备代理商 2026-03-14
- 河南扫描电镜原位加载设备哪里有卖 2026-03-14
- 贵州Psylotech试验机哪里能买到 2026-03-13
- 海南原位加载系统哪里有 2026-03-13
- 海南Psylotech原位加载设备 2026-03-12
- 海南显微镜原位加载设备代理商 2026-03-12