行吊设备在露天堆场中使用时,立体空间防护传感器需要承受日晒雨淋和温度变化。堆场内存放钢管、型材等金属物料,行吊大车沿轨道移动,轨道长度超过100米。传感器安装在大车端梁的两端,监测轨道前方是否有人员或物料堆放。行吊操作室位于大车下方,操作人员视线受限。传感器提供距离信息,在操作室内的显示屏上以数字和图形两种方式呈现。距离小于10米时显示屏上的数字变为黄色,同时发出间断报警音。距离小于5米时数字变为红色,报警音变为连续长鸣。操作人员未采取制动措施的情况下,传感器输出信号直接控制大车变频器的使能端子。变频器输出频率在1秒内从50赫兹降至0赫兹,大车滑行距离不超过500毫米。传感器的工作温度范围为零下30摄氏度至60摄氏度,满足堆场全年使用需求。内部加热器在温度低于零下10摄氏度时自动启动,加热功率为10瓦。传感器窗口使用钢化玻璃,厚度为4毫米,能抵抗冰雹冲击。AI不检测工件、工具、物料箱等非生命体,只检测人。四川机器人失控传感器智能调节
立体空间防护传感器在汽车总装车间的底盘合装工位用于检测车身与合装台车的相对位置。合装台车承载发动机和后桥举升,与下降的车身完成对接。传感器安装在合装台车四个角落,向上发射探测波束。车身下降过程中,传感器持续测量台车与车身底盘之间的距离。四个距离值在操作面板上以数字形式显示。当四个距离值均小于10毫米且相互差异不超过3毫米时,控制系统判断对接完成,停止台车举升并发出完成信号。传感器采用超声波测距方式,测量范围为50至500毫米,输出为模拟量4至20毫安电流信号。超声波对车身底盘的油污和灰尘不敏感,测量结果稳定。合装工位存在发动机启动时的噪声和振动,噪声频率可能干扰超声波传感器。传感器接收电路内部带有带通滤波器,只通过40千赫兹附近的频率成分。发动机噪声的频率成分主要集中在低频段,与超声波工作频率不同,因此不影响测量。传感器外壳为压铸铝材质,表面喷涂灰色面漆。安装底座配有橡胶减震垫,降低振动传递。供电线路与动力线路分开布线,使用屏蔽电缆传输模拟量信号。北京Ai防撞传感器智能调节支持多传感器数据融合,统一平台集中管理。
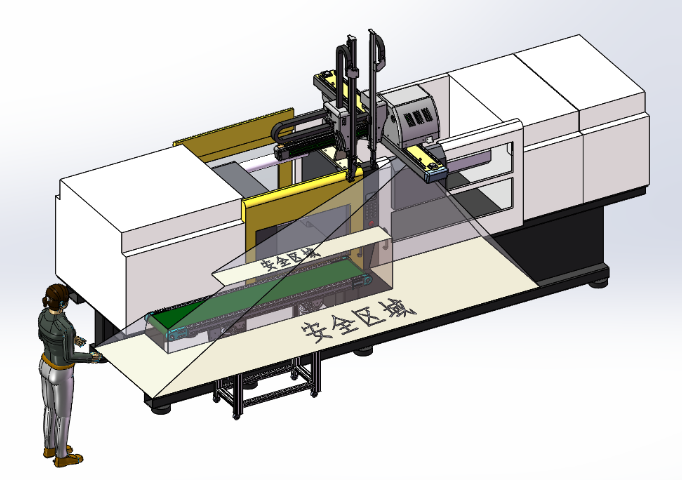
不同设备、不同工位的安全风险往往各不相同。有的区域需要高灵敏度检测微小入侵,有的区域则只需防止人员整体进入。大德恒通防撞传感器支持每个检测区域的灵敏度**调节,且可自由匹配不同的I/O开关量输出。这意味着,您可以在同一台设备上,将危险区域划分为多个不同等级的防护区:例如,**危险区设置高灵敏度,一旦有人靠近立即停机;**警戒区设置较低灵敏度,*触发蜂鸣器提醒。这种精细化的分级防护,既保证了关键区域的安全,又避免了过度频繁停机对生产的影响。传感器还支持多场景存储,不同工序可调用不同防护方案,真正实现“一台传感器,应对多种风险”。
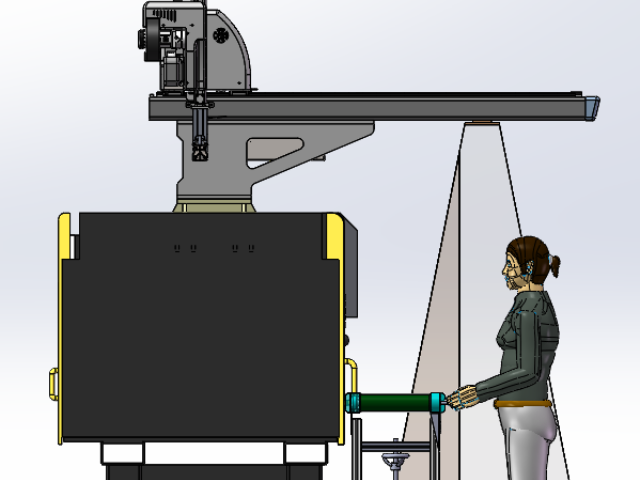
很多安全传感器会检测区域内所有运动物体,包括设备本身的运动部件,导致频繁误触发。大德恒通防撞传感器在设计之初就明确了“只检测区域内操作人员,不检测设备”的原则。通过AI算法与背景建模技术,传感器能够自动忽略机械臂、传送带、工件等非人员目标的正常运动,*当人员入侵时才触发报警。这意味着,设备在高速运转时,防撞传感器不会因为机械臂自身的摆动而误停,生产效率得到充分保障。这种“人机分离感知”的能力,是工业级防撞传感器区别于通用安防传感器的**差异。传感器可识别人员肢体部位,伸手进入危险区也能检测。

立体空间防护传感器在纸箱码垛机器人中用于检测码垛层高。码垛机器人将输送线上的纸箱逐层堆叠在托盘上。每层码放完成后,传感器测量当前堆垛顶部与机器人抓头之间的距离。该距离值被用于确定下一层纸箱的放置高度。随着堆垛层数增加,距离数值逐渐减小。当距离数值小到设定阈值时,表示托盘上的纸箱已经达到预定层数。机器人停止码垛动作,发出满垛信号,由叉车将托盘运走。传感器采用超声波测距方式,对纸箱表面的颜色和图案不敏感。即使纸箱表面印刷有大面积深色图案或反光覆膜,超声波仍能可靠反射。传感器的探测波束角度为15度,在2米距离处覆盖直径约0.5米的圆形区域。该覆盖范围能够适应不同尺寸的纸箱,不需要频繁调整安装位置。传感器外壳为聚对苯二甲酸丁二醇酯材料,阻燃等级V0。接线方式为四线制,包含电源正负极、输出信号线和屏蔽地线。在纸箱粉尘较多的环境中,传感器每四周进行一次清洁。使用软毛刷***超声波发射面的积尘,避免使用有机溶剂擦拭,防止材料表面损伤。反应速度快,不影响生产节拍,实现安全与产能平衡。北京冲压机防护传感器源头厂家
整厂自动化生产线可多台联用,互不干扰,协同防护。四川机器人失控传感器智能调节
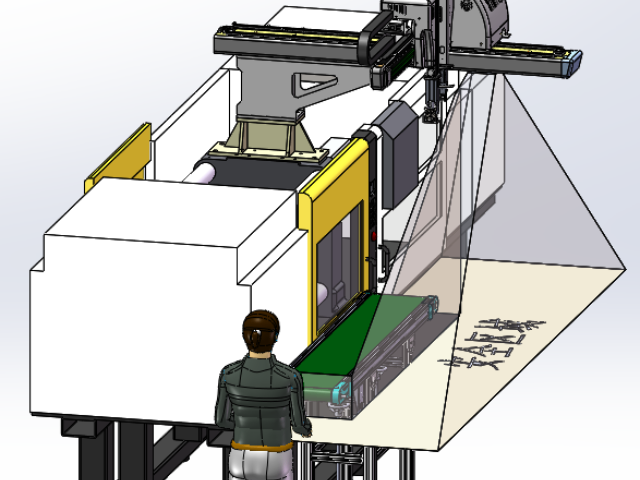
立体空间防护传感器在焊接机器人工作站中的应用体现在安全防护方面。焊接机器人在进行弧焊作业时,其运动范围覆盖工件台及周边区域。操作人员需要靠近工作站进行工件装卸。传感器安装在机器人上方的横梁或立柱上,监测下方空间。当人员弯腰进入工作区域时,传感器检测到人体轮廓,输出信号到安全继电器。机器人焊接电源输出被切断,焊枪停止放电。同时机器人运动轴进入暂停状态。待人员退出监测区域后,按下复位按钮机器人恢复动作。传感器采用飞行时间测量原理,发射近红外波段的激光脉冲。脉冲宽度为5纳秒,峰值功率满足工业环境下的抗干扰要求。接收端采用单光子雪崩二极管阵列,能够探测微弱回波信号。传感器外壳为压铸铝材质,表面喷塑处理。防护等级为IP67,能抵抗焊接飞溅物的附着。维护人员每周使用铜丝刷清理传感器表面的飞溅颗粒,避免堆积影响探测窗口透光率。供电电压为24伏直流,消耗电流为150毫安。输出形式为两个PNP开关量通道,一个用于预警,一个用于停车。四川机器人失控传感器智能调节
深圳市大德恒通科技有限公司汇集了大量的优秀人才,集企业奇思,创经济奇迹,一群有梦想有朝气的团队不断在前进的道路上开创新天地,绘画新蓝图,在广东省等地区的机械及行业设备中始终保持良好的信誉,信奉着“争取每一个客户不容易,失去每一个用户很简单”的理念,市场是企业的方向,质量是企业的生命,在公司有效方针的领导下,全体上下,团结一致,共同进退,**协力把各方面工作做得更好,努力开创工作的新局面,公司的新高度,未来深圳市大德恒通科技供应和您一起奔向更美好的未来,即使现在有一点小小的成绩,也不足以骄傲,过去的种种都已成为昨日我们只有总结经验,才能继续上路,让我们一起点燃新的希望,放飞新的梦想!