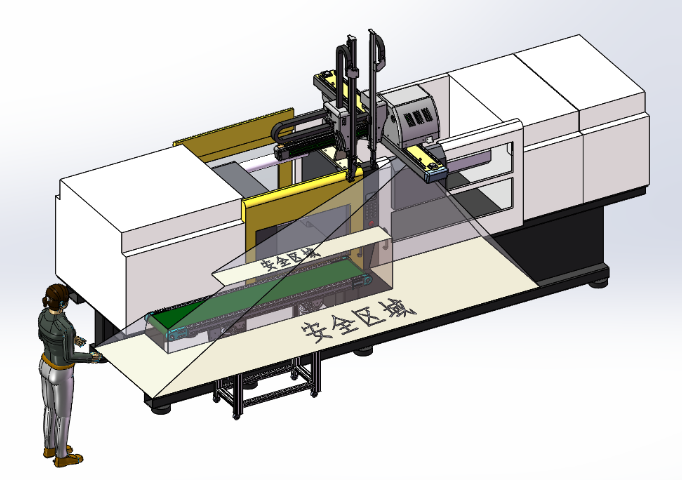
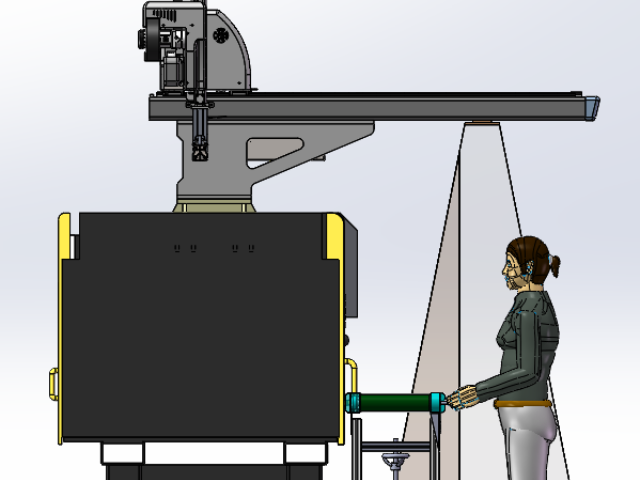
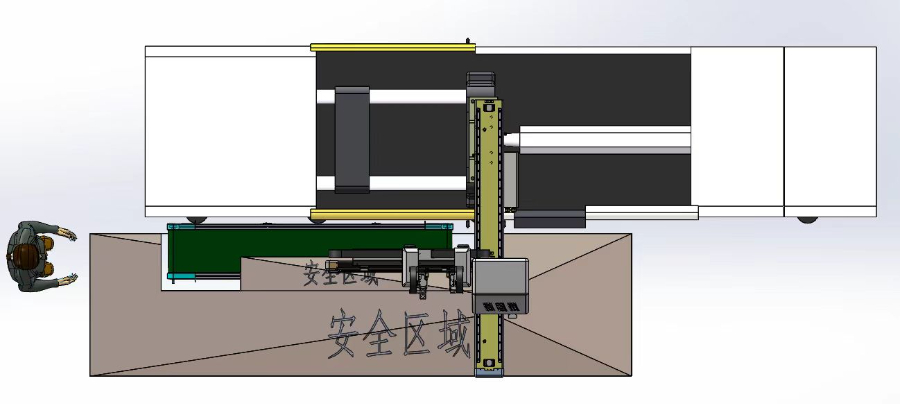
不同设备的安装空间和结构差异很大,有的只能正上方安装,有的只能侧装,有的需要倾斜一定角度。大德恒通防撞传感器支持20°至55°的倾斜安装角度,且在此范围内检测性能不受明显影响。安装调试手册中明确给出了不同安装高度(2.5米、3.6米)对应不同倾斜角度下的正向检测距离(5米、6米),用户可据此快速确定比较好安装位置。这种宽容的安装适应性,大幅降低了现场部署的难度,即使在空间受限或结构复杂的设备上,也能找到合适的安装方案,无需定制特殊支架或改造设备结构。可检测人员是否进入电子围栏区域,替代传统围栏。山西机械臂伤人事故传感器设备
立体空间防护传感器在自动化饲料包装线中用于检测缝包机前的料袋位置。饲料包装袋在灌装后由传送带送至缝包机进行封口。传感器安装在缝包机入口前方500毫米处,检测料袋是否到达预定位置。料袋到达时光束被遮挡,传感器输出信号触发缝包机启动。缝包机针头在料袋移动过程中完成缝合,料袋通过后传感器光束恢复导通,缝包机停止运行等待下一个料袋。传感器采用对射式光电原理,发射器与接收器分别安装在传送带两侧支架上。饲料车间粉尘浓度较高,普通光电传感器窗口容易积尘导致信号衰减。该传感器窗口配备雨刮式自清洁装置,每隔30分钟刮擦一次窗口表面。雨刮片材料为硅橡胶,动作由微型电机驱动。清洁周期可根据现场粉尘情况通过拨码开关调整,分为15分钟、30分钟、60分钟三档。传感器外壳防护等级为IP65,供电电压为24伏直流。输出形式为继电器触点,触点容量为3安培。安装支架为镀锌钢板冲压件,可沿垂直方向调节200毫米范围。维护人员每周检查雨刮片磨损情况,刮片边缘出现毛刺时更换。接线盒内设有透明观察窗,用于观察继电器动作状态指示灯。吉林机械臂伤人事故传感器场景适配支持多段悬空检测,同一区域不同高度单独防护。

传统的安全传感器多采用IO硬接线输出,虽然简单可靠,但难以实现远程监控和参数配置。大德恒通防撞传感器标配Ethernet通信接口,用户可通过网络实时查看传感器的检测画面、修改防护区域、导出日志数据,甚至进行远程固件升级。对于拥有**控制室的智能工厂,工程师无需走到每台设备前,即可完成所有防撞传感器的状态巡检和参数调整。网络化还支持多传感器数据融合,将多台传感器的检测结果集中到一个平台进行统一管理和联动分析,大幅提升了安全管理效率。
立体空间防护传感器在电子元器件插件机中用于检测元件引脚是否插入电路板孔位。插件机将电子元件从编带中取出,插入电路板对应的孔位。传感器安装在插装头上方,在元件插入后检测引脚末端与电路板背面的距离。四个引脚全部穿过电路板时传感器测量到的距离较小,有引脚未穿过时距离较大。距离值超过设定阈值时判定为插入失败,插件机停止并将电路板标记为待修品。传感器采用同轴反射式光纤原理,发射光纤和接收光纤并排布置在同一探头内。光纤探头直径为2毫米,可安装在插装头的狭小空间内。光纤放大器主机距离探头3米,使用柔性光缆连接。放大器内部有红光LED光源和硅光电池接收器。检测距离通过放大器面板上的调节旋钮设定,检测范围0至5毫米。电路板材质为FR4玻璃纤维,背面有焊盘和导线。元件引脚材质为锡镀层铜线,反射率高于电路板。传感器根据反射光强度差异判断引脚是否存在。插入失败的元件引脚弯曲或未穿过,反射光强不足。放大器的响应速度为0.2毫秒,插件机插装速度为每秒2次。光纤探头前端安装不锈钢保护套管,套管长度10毫米,防止探头与电路板碰撞。维护人员每周检查光纤端面是否脏污,使用**清洁棒擦拭。产品尺寸120*70*40mm,小巧紧凑,安装不占地。
很多安全传感器会检测区域内所有运动物体,包括设备本身的运动部件,导致频繁误触发。大德恒通防撞传感器在设计之初就明确了“只检测区域内操作人员,不检测设备”的原则。通过AI算法与背景建模技术,传感器能够自动忽略机械臂、传送带、工件等非人员目标的正常运动,*当人员入侵时才触发报警。这意味着,设备在高速运转时,防撞传感器不会因为机械臂自身的摆动而误停,生产效率得到充分保障。这种“人机分离感知”的能力,是工业级防撞传感器区别于通用安防传感器的**差异。提供时间飞行法检测,毫米级精度,确保安全无死角。河北防护防撞传感器场景适配
支持多传感器数据融合,统一平台集中管理。山西机械臂伤人事故传感器设备
立体空间防护传感器在粉末冶金压机中用于检测填料高度。金属粉末被填入阴模型腔后,上模冲下压将粉末压制成形。传感器安装在阴模上方,测量填粉后的粉面高度。粉面高度应保持在设定值的正负0.2毫米范围内。高度超出范围时压出的零件密度不合格。传感器在每次填粉后、上模冲下压前进行一次测量。测量值超出允许范围时,压机停止动作并发出报警,等待操作人员调整送粉靴的行程。传感器采用激光三角测量原理,测量范围为10至30毫米,分辨率为0.01毫米。激光波长为650纳米,红色光斑直径为0.5毫米。金属粉末表面粗糙,对激光产生漫反射。传感器接收透镜收集漫反射光,在光电探测器上成像。粉面高度变化时成像位置改变,通过计算像移得出高度值。传感器的测量不受粉末颜色的影响。黑色铁粉和有色金属粉末的测量结果一致。传感器窗口配备压缩空气吹扫装置,防止粉末飘落污染透镜。吹扫气压为0.1兆帕,每次测量前自动吹扫0.5秒。外壳防护等级为IP54,供电为24伏直流。输出为RS485通信接口,与压机控制器交换数据。山西机械臂伤人事故传感器设备
深圳市大德恒通科技有限公司汇集了大量的优秀人才,集企业奇思,创经济奇迹,一群有梦想有朝气的团队不断在前进的道路上开创新天地,绘画新蓝图,在广东省等地区的机械及行业设备中始终保持良好的信誉,信奉着“争取每一个客户不容易,失去每一个用户很简单”的理念,市场是企业的方向,质量是企业的生命,在公司有效方针的领导下,全体上下,团结一致,共同进退,**协力把各方面工作做得更好,努力开创工作的新局面,公司的新高度,未来深圳市大德恒通科技供应和您一起奔向更美好的未来,即使现在有一点小小的成绩,也不足以骄傲,过去的种种都已成为昨日我们只有总结经验,才能继续上路,让我们一起点燃新的希望,放飞新的梦想!