立体空间防护传感器在自动铆接机中用于检测铆钉是否送入铆接头。铆钉通过振动盘和送钉管逐颗送至铆接头的夹爪位置。传感器安装在铆接头侧面,检测铆钉是否已经到位。铆钉到位后传感器输出信号,铆接机压紧工件并完成铆接。若送钉失败,传感器无输出,铆接机等待一定时间后再次请求送钉。连续三次送钉失败则停机报警。传感器采用反射式光电原理,红外光从探头发出,经过铆钉表面反射后返回接收器。铆钉表面为镀锌处理,反射率较高。铆钉颜色有差异时反射光强略有不同,传感器内部设有自动增益控制电路。自动增益控制根据接收光强调节放大倍数,使不同颜色铆钉的输出信号稳定。传感器的检测距离设定为15毫米,铆钉直径3至8毫米均可检出。探头前端装有防油罩,防止铆接头润滑油脂飞溅污染光学元件。防油罩为透明聚碳酸酯材质,每班次更换一次。在铆接机高速冲击振动下,传感器安装螺丝容易松动。安装时使用螺纹锁固胶涂覆在螺丝上,胶水型号为中等强度,拆卸时可用普通工具。传感器供电为12伏直流,输出为继电器触点,触点容量1安培。指示灯为红色LED,检测到铆钉时点亮。适用于铸造、焊接、打磨等存在烟尘或光线剧烈变化的车间。陕西机器人防撞传感器
智能仓储机器人(AGV/AMR)在仓库中穿梭运行,与人员、叉车、货架之间存在复杂的交互风险。传统的激光雷达或超声波避障传感器多用于检测障碍物,但对人员识别不够精细。大德恒通防撞传感器可部署在仓储机器人的关键位置或仓库的固定点位,实时检测人员是否进入机器人的运行路径。当检测到人员靠近时,机器人可主动减速或绕行;若人员突然闯入危险区,则立即紧急停止。传感器支持自定义多边形防护区域,可适应仓库中不规则的货架布局和通道形状。这种针对性的防护能力,***提升了人机混行仓库的安全性。江苏空间防护传感器设备制造传感器与设备互控,可动态切换防护场景。

立体空间防护传感器在数控机床自动门区域用于检测门的位置。数控机床防护门在自动加工过程中应处于关闭状态,防止切屑飞溅和冷却液外泄。传感器安装在门框的上方和下方两个位置,检测门板是否完全闭合。门板闭合时上下两个传感器同时感应到门板边缘,输出闭合信号。加工循环才能启动。门板开启时至少有一个传感器无输出,加工循环被禁止或正在进行的加工被暂停。传感器采用磁感应原理,门板边缘嵌有永磁体,传感器内部为磁簧开关。永磁体靠近时磁簧开关触点吸合,远离时触点断开。这种检测方式不受切屑和冷却液的干扰。铁质切屑吸附在永磁体上时,磁力线分布发生改变。维护人员每班次检查永磁体表面是否有切屑堆积,使用塑料铲***吸附物。***后使用高斯计测量表面磁场强度,强度低于60毫特斯拉时更换永磁体。传感器的响应时间为0.5毫秒,能够检测门板快速移动时的到位瞬间。安装支架可调节高度和角度,适配不同型号机床的门板厚度。接线使用快速端子,更换传感器时不需要重新标记线号。
立体空间防护传感器在自动化饲料包装线中用于检测缝包机前的料袋位置。饲料包装袋在灌装后由传送带送至缝包机进行封口。传感器安装在缝包机入口前方500毫米处,检测料袋是否到达预定位置。料袋到达时光束被遮挡,传感器输出信号触发缝包机启动。缝包机针头在料袋移动过程中完成缝合,料袋通过后传感器光束恢复导通,缝包机停止运行等待下一个料袋。传感器采用对射式光电原理,发射器与接收器分别安装在传送带两侧支架上。饲料车间粉尘浓度较高,普通光电传感器窗口容易积尘导致信号衰减。该传感器窗口配备雨刮式自清洁装置,每隔30分钟刮擦一次窗口表面。雨刮片材料为硅橡胶,动作由微型电机驱动。清洁周期可根据现场粉尘情况通过拨码开关调整,分为15分钟、30分钟、60分钟三档。传感器外壳防护等级为IP65,供电电压为24伏直流。输出形式为继电器触点,触点容量为3安培。安装支架为镀锌钢板冲压件,可沿垂直方向调节200毫米范围。维护人员每周检查雨刮片磨损情况,刮片边缘出现毛刺时更换。接线盒内设有透明观察窗,用于观察继电器动作状态指示灯。港口集卡后方安装,装卸作业时保护指挥人员安全。
自动化锻造生产线中,高温锻件的温度超过1000摄氏度。立体空间防护传感器安装在夹持机械手附近,用于检测锻件的位置和姿态。锻件在加热炉中取出后由机械手夹持送至压机。传感器发射激光束照射锻件表面,根据反射光的时间差计算距离。锻件处于高温状态时会发出红外辐射,这种辐射可能干扰传感器的接收电路。传感器内部安装有窄带滤光片,只允许激光波长的光信号通过。锻件自身辐射的红外光波长与激光不同,被滤光片阻挡在外。传感器因此在高温环境下仍能获得稳定的距离测量值。检测距离设置为200毫米至800毫米范围,传感器输出模拟量信号表示锻件表面与机械手爪之间的实际距离。控制系统根据距离值调整机械手的进给速度。距离较大时速度较快,距离接近设定抓取位置时速度降低,实现平稳接触。传感器外壳采用不锈钢材料,表面抛光处理便于散热。安装位置远离锻件正上方,避免掉落的高温氧化皮覆盖传感器窗口。维护人员每两个小时检查一次窗口是否有氧化皮附着,使用压缩空气吹扫清理。采用高光谱算法,只通过一次拍摄完成人员识别。山东机器人失控传感器智能调节
无线传输选配方案,适合叉车、移动机器人等临时部署场景。陕西机器人防撞传感器
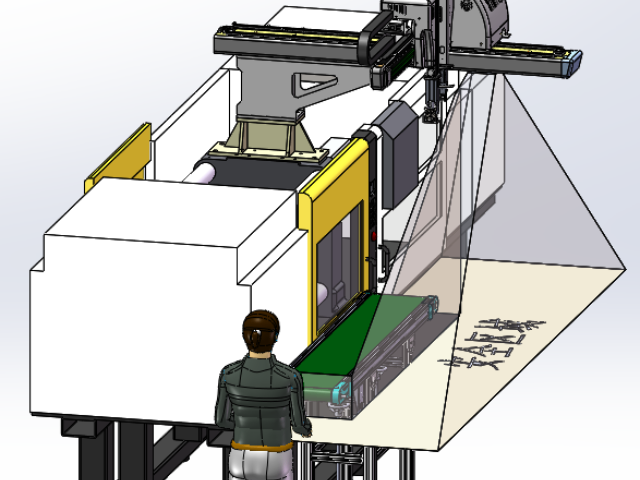
任何安全防护系统都存在“盲区”风险——传感器无法覆盖的角度、距离或形状,往往就是事故发生的温床。大德恒通防撞传感器通过3D立体空间成像与多区域**设置功能,有效消除了传统传感器的检测盲区。用户可以根据设备实际运动轨迹,在软件中绘制多个不同形状、不同高度的防护区域,覆盖设备的所有危险动作范围。例如,对于一台桁架机械手,可以分别设置横梁下方区域、立柱侧方区域、末端执行器周围区域等多个防护区,每个区域**判断、**输出。同时,传感器支持95°×90°的大视场角,安装高度2.5米至3.6米时,正向检测距离可达5-6米。配合倾斜安装方式,几乎没有检测死角。这种“全向立体覆盖”的能力,使得防撞传感器在面对复杂设备时依然能够提供可靠的安全保障。陕西机器人防撞传感器
深圳市大德恒通科技有限公司汇集了大量的优秀人才,集企业奇思,创经济奇迹,一群有梦想有朝气的团队不断在前进的道路上开创新天地,绘画新蓝图,在广东省等地区的机械及行业设备中始终保持良好的信誉,信奉着“争取每一个客户不容易,失去每一个用户很简单”的理念,市场是企业的方向,质量是企业的生命,在公司有效方针的领导下,全体上下,团结一致,共同进退,**协力把各方面工作做得更好,努力开创工作的新局面,公司的新高度,未来深圳市大德恒通科技供应和您一起奔向更美好的未来,即使现在有一点小小的成绩,也不足以骄傲,过去的种种都已成为昨日我们只有总结经验,才能继续上路,让我们一起点燃新的希望,放飞新的梦想!