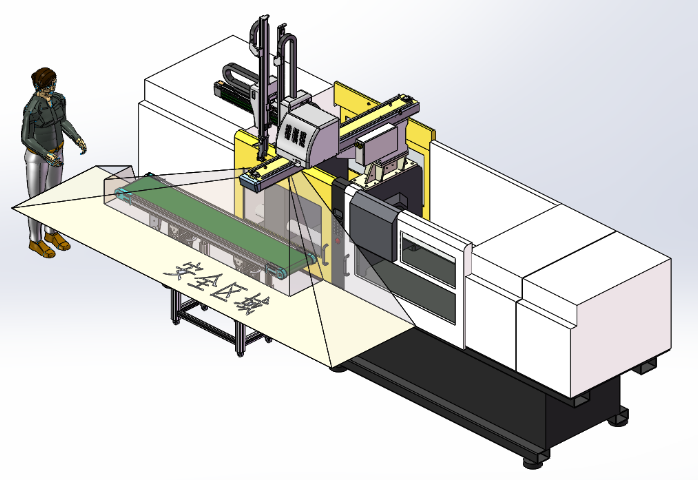
冲压自动化生产线中,拆垛机械手从料垛顶部抓取板料送入清洗机和涂油机。立体空间防护传感器安装在机械手抓取头侧面,检测料垛顶部板料的高度位置。随着板料被逐张取走,料垛高度逐渐下降。传感器测量抓取头与板料表面之间的距离,距离值被用于控制机械手的下降行程。当距离大于设定值时,机械手下降幅度增加。距离小于设定值时下降幅度减小。这种闭环控制使抓取头每次都以相同的高度接触板料表面,避免冲击过大损伤板料或抓取头。传感器也能检测料垛是否倾斜。四个传感器分别安装在抓取头四周,同时测量各自与板料表面的距离。四个距离值相差超过5毫米时,判断料垛倾斜。控制系统发出报警并停止取料,等待人工整理料垛。传感器在板料表面有油膜覆盖时仍能正常工作。油膜厚度不超过0.1毫米时对激光反射率的影响可以忽略。油膜较厚时传感器自动增加发射功率,保持接收信号幅度稳定。传感器的输出为模拟量4至20毫安信号,与机械手控制器的模拟量输入模块直接连接。无需频繁更换重装,电脑设定即可快速调整防护区域。广东工业安全传感器售后服务
对于整厂智能化改造项目,往往需要同时部署数十甚至上百台防撞传感器。大德恒通在生产过程中严格执行批量校准流程,确保每台传感器在检测精度、响应速度、输出特性等方面保持高度一致。出厂前每台产品均经过老化测试和环境适应性验证。配套的上位机软件支持批量配置和固件升级,大幅降低大规模部署的调试工作量。对于系统集成商和大型终端用户而言,这种一致性和可管理性,是选择传感器供应商时的重要考量因素。大德恒通还提供终身**软件维护升级服务,确保大规模部署后的长期可维护性。广西冲压机防护传感器代理价钱毫秒级响应速度,人员入侵立即停机,为安全生产抢下黄金时间。
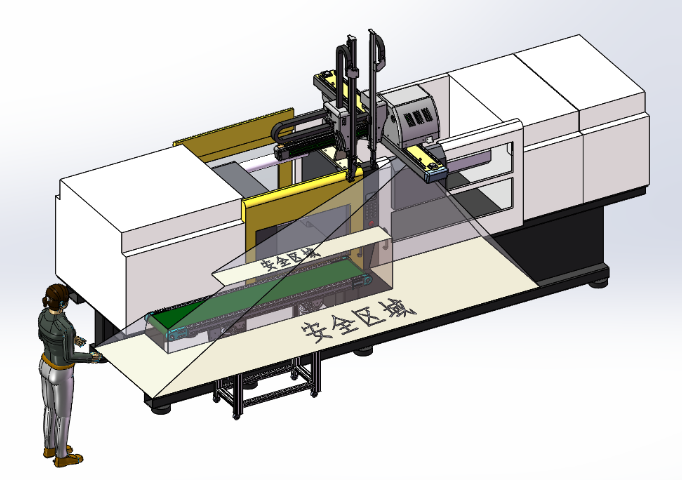
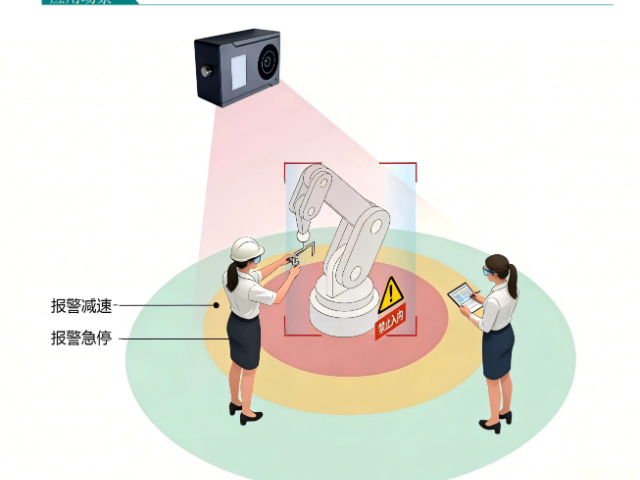
立体空间防护传感器在机械手工作区域中起到安全防护与避障作用。机械手在自动运行过程中,其工作半径内可能存在人员进出或工具摆放的情况。传感器实时监测机械手周围的空间区域,当检测到人员或物体进入预设的危险边界时,立即向控制系统发出信号。控制系统收到信号后触发机械手减速或完全停止。这种机制避免了机械手与人员或其他设备发生碰撞。在机械手与操作人员共享工作区域的场合,传感器能够区分人体与设备运动部件。操作人员在正常作业时不会触发不必要的停机,而一旦肢体越过安全界线,设备响应在毫秒级别内完成。传感器采用激光或超声波技术,对不同材质的目标均有响应。安装位置通常选择在机械手底座或末端执行器附近,监测范围根据实际工况调节。维护人员每两周检查一次传感器表面清洁度,使用软布***油污和粉尘。供电电压为12至24伏直流,输出信号类型包含开关量和模拟量。
在密集的自动化产线中,多台传感器同时工作可能产生相互干扰,导致误报或漏报。大德恒通防撞传感器内置抗干扰算法,支持多机同时工作而互不影响。无论是多台机械手并排作业,还是AGV小车与固定设备在同一空间运行,每台传感器都能稳定检测各自负责的区域。此外,传感器还具备抗强光干扰能力,避免车间照明或室外光线变化对检测精度的影响。EMC电磁兼容性设计,使其能够抵御电机、变频器等设备产生的电磁干扰。这些抗干扰特性,使防撞传感器能够适应复杂的工业现场环境,确保长期稳定运行。通过CE、FCC等国际认证,品质可靠,全球适用。
立体空间防护传感器在自动化饲料包装线中用于检测缝包机前的料袋位置。饲料包装袋在灌装后由传送带送至缝包机进行封口。传感器安装在缝包机入口前方500毫米处,检测料袋是否到达预定位置。料袋到达时光束被遮挡,传感器输出信号触发缝包机启动。缝包机针头在料袋移动过程中完成缝合,料袋通过后传感器光束恢复导通,缝包机停止运行等待下一个料袋。传感器采用对射式光电原理,发射器与接收器分别安装在传送带两侧支架上。饲料车间粉尘浓度较高,普通光电传感器窗口容易积尘导致信号衰减。该传感器窗口配备雨刮式自清洁装置,每隔30分钟刮擦一次窗口表面。雨刮片材料为硅橡胶,动作由微型电机驱动。清洁周期可根据现场粉尘情况通过拨码开关调整,分为15分钟、30分钟、60分钟三档。传感器外壳防护等级为IP65,供电电压为24伏直流。输出形式为继电器触点,触点容量为3安培。安装支架为镀锌钢板冲压件,可沿垂直方向调节200毫米范围。维护人员每周检查雨刮片磨损情况,刮片边缘出现毛刺时更换。接线盒内设有透明观察窗,用于观察继电器动作状态指示灯。智慧停车系统应用,检测人员误入车道联动报警。陕西人物区分防护传感器方案设计
适用于汽车工厂、3C电子等高危作业区域安全防护。广东工业安全传感器售后服务
立体空间防护传感器在协作机器人打磨工位中用于区分人体与工件。打磨机器人末端装有气动打磨头,工件固定在台面上。操作人员需要手持工件在打磨头上进行去毛刺作业。传感器安装在机器人底座上方1.2米高度处,向下倾斜15度角探测。传感器能够识别操作人员的手臂和工件之间的差异。手臂表面覆盖工作服,红外反射率较低。工件表面为金属或塑料,红外反射率较高。传感器接收回波强度时,根据反射率差异判断目标的类别。当检测到低反射率目标靠近打磨头时,机器人降低转速。当检测到高反射率目标靠近时,机器人保持正常转速。这种区别处理使操作人员可以安全地手持工件靠近打磨头,而手臂接触打磨头时机器人立即停止。传感器的识别算法在出厂时预置了多种材料的反射率参数。用户也可以自行录入新材料的反射率数据。传感器的探测频率为每秒20次,能够捕捉快速运动的手臂轨迹。安装底座上有角度刻度盘,方便调整探测角度并记录位置。广东工业安全传感器售后服务
深圳市大德恒通科技有限公司汇集了大量的优秀人才,集企业奇思,创经济奇迹,一群有梦想有朝气的团队不断在前进的道路上开创新天地,绘画新蓝图,在广东省等地区的机械及行业设备中始终保持良好的信誉,信奉着“争取每一个客户不容易,失去每一个用户很简单”的理念,市场是企业的方向,质量是企业的生命,在公司有效方针的领导下,全体上下,团结一致,共同进退,**协力把各方面工作做得更好,努力开创工作的新局面,公司的新高度,未来深圳市大德恒通科技供应和您一起奔向更美好的未来,即使现在有一点小小的成绩,也不足以骄傲,过去的种种都已成为昨日我们只有总结经验,才能继续上路,让我们一起点燃新的希望,放飞新的梦想!