立体空间防护传感器在汽车总装车间的底盘合装工位用于检测车身与合装台车的相对位置。合装台车承载发动机和后桥举升,与下降的车身完成对接。传感器安装在合装台车四个角落,向上发射探测波束。车身下降过程中,传感器持续测量台车与车身底盘之间的距离。四个距离值在操作面板上以数字形式显示。当四个距离值均小于10毫米且相互差异不超过3毫米时,控制系统判断对接完成,停止台车举升并发出完成信号。传感器采用超声波测距方式,测量范围为50至500毫米,输出为模拟量4至20毫安电流信号。超声波对车身底盘的油污和灰尘不敏感,测量结果稳定。合装工位存在发动机启动时的噪声和振动,噪声频率可能干扰超声波传感器。传感器接收电路内部带有带通滤波器,只通过40千赫兹附近的频率成分。发动机噪声的频率成分主要集中在低频段,与超声波工作频率不同,因此不影响测量。传感器外壳为压铸铝材质,表面喷涂灰色面漆。安装底座配有橡胶减震垫,降低振动传递。供电线路与动力线路分开布线,使用屏蔽电缆传输模拟量信号。可自行搭建防护系统,也可与围栏、光栅、门锁搭配使用。青海机器人防护传感器方案设计
防撞传感器的检测距离直接影响其适用场景。大德恒通产品在3-6米范围内均可稳定工作,用户可根据设备大小和安装高度灵活选择。在较远距离(如6米)时,传感器仍能保持足够的分辨率以识别人员入侵;在较近距离(如2-3米)时,则可实现更高的检测精度,甚至可以识别肢体部位的局部入侵。这种“远可覆盖、近可精细”的特点,使得同一款传感器既能用于大型龙门机械手,也能用于小型协作机器人。产品选型表中还提供了不同型号(如DRF-AI30-S3、DRF-AI30-Z3等)供用户根据实际检测距离需求选择,确保性能与场景的比较好匹配。山西机器人防护传感器肤感高柔电缆,抗弯折耐磨损,适合运动部件安装。
很多企业在引入智能安全设备时,比较大的顾虑就是调试复杂、维护困难。大德恒通防撞传感器配套“DDH智能防护系统1.0”上位机软件,界面清晰、操作直观。用户只需通过以太网连接传感器,即可在电脑上实时查看检测画面,并用鼠标直接在图像上绘制防护区域——支持矩形、圆形、多边形等多种形状,区域大小、位置、数量均可自由设定。每个检测区域还可**调节灵敏度,自由匹配I/O开关量输出。一套传感器可存储多个防护场景,适应同一设备在不同工位、不同工序下的安全需求,一键切换即可完成防护方案调整。这种“所见即所得”的调试方式,大幅降低了使用门槛,普通电气工程师或设备管理员经过简单培训即可**完成设置,真正实现了防撞传感器的易用性与普及性。
立体空间防护传感器需要适应工业现场的各种环境条件。焊接车间存在强弧光,光线中包含紫外线和红外线成分。铸造车间有粉尘悬浮,颗粒大小从微米级到毫米级不等。室外安装的设备要经受阳光直射和雨雪天气。传感器在设计时采用多种技术手段抵抗环境干扰。抗强光方面,发射光波经过调制,接收端只对特定频率的信号进行放大。环境中的静态光强被滤波电路滤除。抗粉尘方面,传感器窗口使用疏水疏油涂层,粉尘不易附着。同时窗口周围设计有气幕接口,通入压缩空气后形成气帘,吹走飘落的粉尘。抗温度变化方面,传感器内部有温度补偿电路。温度传感器的数值被用于修正探测距离的计算公式。不同温度下测得的同一目标距离保持一致。传感器外壳材料添加抗紫外线成分,长期室外使用不出现变色或开裂。接线盒内放置干燥剂包,吸收昼夜温差产生的凝露。报警复位延时功能可调,灵活匹配不同工况的报警持续时间。

自动化锻造生产线中,高温锻件的温度超过1000摄氏度。立体空间防护传感器安装在夹持机械手附近,用于检测锻件的位置和姿态。锻件在加热炉中取出后由机械手夹持送至压机。传感器发射激光束照射锻件表面,根据反射光的时间差计算距离。锻件处于高温状态时会发出红外辐射,这种辐射可能干扰传感器的接收电路。传感器内部安装有窄带滤光片,只允许激光波长的光信号通过。锻件自身辐射的红外光波长与激光不同,被滤光片阻挡在外。传感器因此在高温环境下仍能获得稳定的距离测量值。检测距离设置为200毫米至800毫米范围,传感器输出模拟量信号表示锻件表面与机械手爪之间的实际距离。控制系统根据距离值调整机械手的进给速度。距离较大时速度较快,距离接近设定抓取位置时速度降低,实现平稳接触。传感器外壳采用不锈钢材料,表面抛光处理便于散热。安装位置远离锻件正上方,避免掉落的高温氧化皮覆盖传感器窗口。维护人员每两个小时检查一次窗口是否有氧化皮附着,使用压缩空气吹扫清理。适用于大型娱乐广场,保障人员密集区域设备运行安全。中国香港机器人失控防护防撞传感器
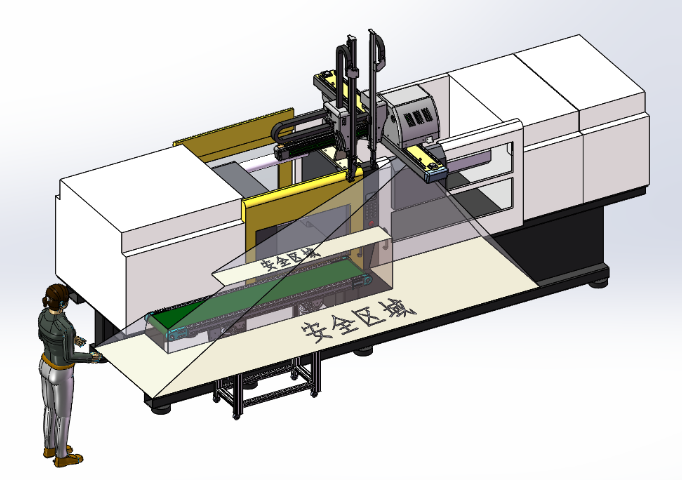
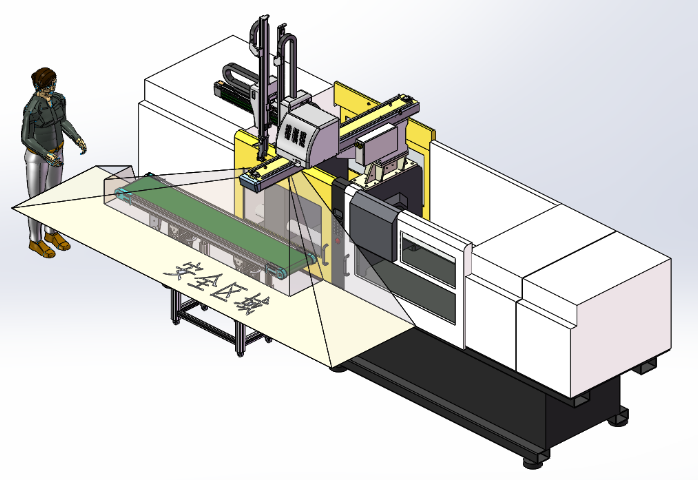
实时生成3D环境图像,精确识别入侵行为与物体的位置。青海机器人防护传感器方案设计
立体空间防护传感器在协作机器人打磨工位中用于区分人体与工件。打磨机器人末端装有气动打磨头,工件固定在台面上。操作人员需要手持工件在打磨头上进行去毛刺作业。传感器安装在机器人底座上方1.2米高度处,向下倾斜15度角探测。传感器能够识别操作人员的手臂和工件之间的差异。手臂表面覆盖工作服,红外反射率较低。工件表面为金属或塑料,红外反射率较高。传感器接收回波强度时,根据反射率差异判断目标的类别。当检测到低反射率目标靠近打磨头时,机器人降低转速。当检测到高反射率目标靠近时,机器人保持正常转速。这种区别处理使操作人员可以安全地手持工件靠近打磨头,而手臂接触打磨头时机器人立即停止。传感器的识别算法在出厂时预置了多种材料的反射率参数。用户也可以自行录入新材料的反射率数据。传感器的探测频率为每秒20次,能够捕捉快速运动的手臂轨迹。安装底座上有角度刻度盘,方便调整探测角度并记录位置。青海机器人防护传感器方案设计
深圳市大德恒通科技有限公司是一家有着先进的发展理念,先进的管理经验,在发展过程中不断完善自己,要求自己,不断创新,时刻准备着迎接更多挑战的活力公司,在广东省等地区的机械及行业设备中汇聚了大量的人脉以及**,在业界也收获了很多良好的评价,这些都源自于自身的努力和大家共同进步的结果,这些评价对我们而言是比较好的前进动力,也促使我们在以后的道路上保持奋发图强、一往无前的进取创新精神,努力把公司发展战略推向一个新高度,在全体员工共同努力之下,全力拼搏将共同深圳市大德恒通科技供应和您一起携手走向更好的未来,创造更有价值的产品,我们将以更好的状态,更认真的态度,更饱满的精力去创造,去拼搏,去努力,让我们一起更好更快的成长!