很多企业的安全管理停留在“制度上墙、口号喊响”的阶段,操作人员对安全的重视程度往往随着时间推移而下降。防撞传感器的引入,从技术层面改变了这一局面。当设备本身具备了“主动防撞”的能力,人员在疲劳、分心或侥幸心理下出现的不规范操作,会立即被传感器识别并触发设备停机与声光报警。这种即时的、不可回避的反馈,比任何培训都更能强化人员的安全意识。安装防撞传感器后,不少企业反馈:员工会主动关注传感器状态,自觉避开危险区域,安全习惯明显改善。这正是技术驱动安全文化的典型案例——用设备的力量,让“我要安全”成为每个人的本能反应。经久耐用,长期稳定运行,降低设备更换与维护成本。湖北工业人体感应防护防撞传感器多组信号输入
立体空间防护传感器在橡胶轮胎硫化机中用于检测模具开合状态。硫化机的模具分为上下两部分,合模时模具闭合形成密闭型腔,开模时模具分离取出轮胎。传感器安装在上模边缘的四个角,检测下模对应位置的距离。合模过程中传感器持续测量上下模之间的距离,距离数值不断减小。当四个角的距离值均小于0.5毫米且相互差异不超过0.1毫米时,控制系统判断模具已经闭合到位。此时硫化机开始保压加热。开模时传感器距离数值增大,达到50毫米时控制系统判断开模完成,允许机械手进入取胎。传感器采用激光三角测量原理,适用于近距离高精度检测。测量范围为零至100毫米,分辨率为0.01毫米。传感器输出的模拟量信号为0至10伏电压,送入可编程控制器的模拟量输入模块。硫化机工作温度较高,模具区域温度达到180摄氏度。传感器安装位置距离模具150毫米处,该处环境温度为70摄氏度。传感器外壳选用耐高温聚酰胺材料,内部电路板涂覆三防漆。维护人员每月校准一次传感器零点,使用标准量块置于检测距离处,调整传感器内部电位器使输出电压与标称值一致。山西机械手安全防护传感器技术指导安装灵活,正上方、侧面或倾斜角度均可快速部署。

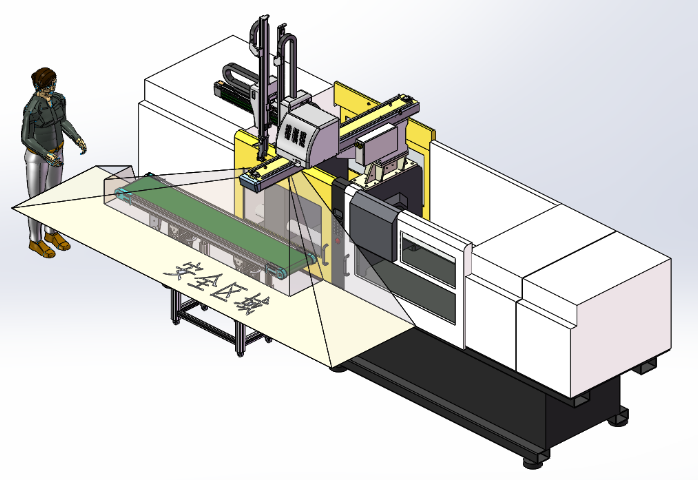
在自动化产线的升级改造中,立体空间防护传感器替代了传统的机械式围栏和光幕。机械式围栏占用地面空间,人员进出需要开门或翻越。光幕只能形成二维平面检测,存在探测盲区。立体空间传感器使用三维探测方式,波束覆盖一个立体锥形区域。区域内部的任何位置只要有目标进入都能被检测到。这种设计允许操作人员在一定范围内自由活动,只有在进入危险区域时设备才会响应。生产线布局调整时,传感器只需要重新设定监测区域参数,不需要移动物理位置。参数设定通过连接调试软件完成,每个传感器的监测形状可以是球形、长方体或自定义轮廓。在不同生产节拍下,传感器响应时间保持稳定。快速移动的设备选用响应时间小于20毫安的型号,慢速设备选用响应时间小于100毫安的型号。安装高度根据设备类型确定。地面移动设备安装高度在200至500毫米之间,空中悬挂设备安装高度在1000至2000毫米之间。
立体空间防护传感器在机械手工作区域中起到安全防护与避障作用。机械手在自动运行过程中,其工作半径内可能存在人员进出或工具摆放的情况。传感器实时监测机械手周围的空间区域,当检测到人员或物体进入预设的危险边界时,立即向控制系统发出信号。控制系统收到信号后触发机械手减速或完全停止。这种机制避免了机械手与人员或其他设备发生碰撞。在机械手与操作人员共享工作区域的场合,传感器能够区分人体与设备运动部件。操作人员在正常作业时不会触发不必要的停机,而一旦肢体越过安全界线,设备响应在毫秒级别内完成。传感器采用激光或超声波技术,对不同材质的目标均有响应。安装位置通常选择在机械手底座或末端执行器附近,监测范围根据实际工况调节。维护人员每两周检查一次传感器表面清洁度,使用软布***油污和粉尘。供电电压为12至24伏直流,输出信号类型包含开关量和模拟量。采用干兆以太网,毫秒级信号传输,确保实时响应。

行吊设备在露天堆场中使用时,立体空间防护传感器需要承受日晒雨淋和温度变化。堆场内存放钢管、型材等金属物料,行吊大车沿轨道移动,轨道长度超过100米。传感器安装在大车端梁的两端,监测轨道前方是否有人员或物料堆放。行吊操作室位于大车下方,操作人员视线受限。传感器提供距离信息,在操作室内的显示屏上以数字和图形两种方式呈现。距离小于10米时显示屏上的数字变为黄色,同时发出间断报警音。距离小于5米时数字变为红色,报警音变为连续长鸣。操作人员未采取制动措施的情况下,传感器输出信号直接控制大车变频器的使能端子。变频器输出频率在1秒内从50赫兹降至0赫兹,大车滑行距离不超过500毫米。传感器的工作温度范围为零下30摄氏度至60摄氏度,满足堆场全年使用需求。内部加热器在温度低于零下10摄氏度时自动启动,加热功率为10瓦。传感器窗口使用钢化玻璃,厚度为4毫米,能抵抗冰雹冲击。采用高光谱算法,只通过一次拍摄完成人员识别。河南电子安全围栏防护防撞传感器代理价钱
数据安全设计,图像本地处理,不上传云端保护隐私。湖北工业人体感应防护防撞传感器多组信号输入
立体空间防护传感器在粉末冶金压机中用于检测填料高度。金属粉末被填入阴模型腔后,上模冲下压将粉末压制成形。传感器安装在阴模上方,测量填粉后的粉面高度。粉面高度应保持在设定值的正负0.2毫米范围内。高度超出范围时压出的零件密度不合格。传感器在每次填粉后、上模冲下压前进行一次测量。测量值超出允许范围时,压机停止动作并发出报警,等待操作人员调整送粉靴的行程。传感器采用激光三角测量原理,测量范围为10至30毫米,分辨率为0.01毫米。激光波长为650纳米,红色光斑直径为0.5毫米。金属粉末表面粗糙,对激光产生漫反射。传感器接收透镜收集漫反射光,在光电探测器上成像。粉面高度变化时成像位置改变,通过计算像移得出高度值。传感器的测量不受粉末颜色的影响。黑色铁粉和有色金属粉末的测量结果一致。传感器窗口配备压缩空气吹扫装置,防止粉末飘落污染透镜。吹扫气压为0.1兆帕,每次测量前自动吹扫0.5秒。外壳防护等级为IP54,供电为24伏直流。输出为RS485通信接口,与压机控制器交换数据。湖北工业人体感应防护防撞传感器多组信号输入
深圳市大德恒通科技有限公司是一家有着先进的发展理念,先进的管理经验,在发展过程中不断完善自己,要求自己,不断创新,时刻准备着迎接更多挑战的活力公司,在广东省等地区的机械及行业设备中汇聚了大量的人脉以及**,在业界也收获了很多良好的评价,这些都源自于自身的努力和大家共同进步的结果,这些评价对我们而言是比较好的前进动力,也促使我们在以后的道路上保持奋发图强、一往无前的进取创新精神,努力把公司发展战略推向一个新高度,在全体员工共同努力之下,全力拼搏将共同深圳市大德恒通科技供应和您一起携手走向更好的未来,创造更有价值的产品,我们将以更好的状态,更认真的态度,更饱满的精力去创造,去拼搏,去努力,让我们一起更好更快的成长!