自动化锻造生产线中,高温锻件的温度超过1000摄氏度。立体空间防护传感器安装在夹持机械手附近,用于检测锻件的位置和姿态。锻件在加热炉中取出后由机械手夹持送至压机。传感器发射激光束照射锻件表面,根据反射光的时间差计算距离。锻件处于高温状态时会发出红外辐射,这种辐射可能干扰传感器的接收电路。传感器内部安装有窄带滤光片,只允许激光波长的光信号通过。锻件自身辐射的红外光波长与激光不同,被滤光片阻挡在外。传感器因此在高温环境下仍能获得稳定的距离测量值。检测距离设置为200毫米至800毫米范围,传感器输出模拟量信号表示锻件表面与机械手爪之间的实际距离。控制系统根据距离值调整机械手的进给速度。距离较大时速度较快,距离接近设定抓取位置时速度降低,实现平稳接触。传感器外壳采用不锈钢材料,表面抛光处理便于散热。安装位置远离锻件正上方,避免掉落的高温氧化皮覆盖传感器窗口。维护人员每两个小时检查一次窗口是否有氧化皮附着,使用压缩空气吹扫清理。医疗设备周边应用,保护患者与操作人员安全。江苏机械手失控传感器多组信号输入
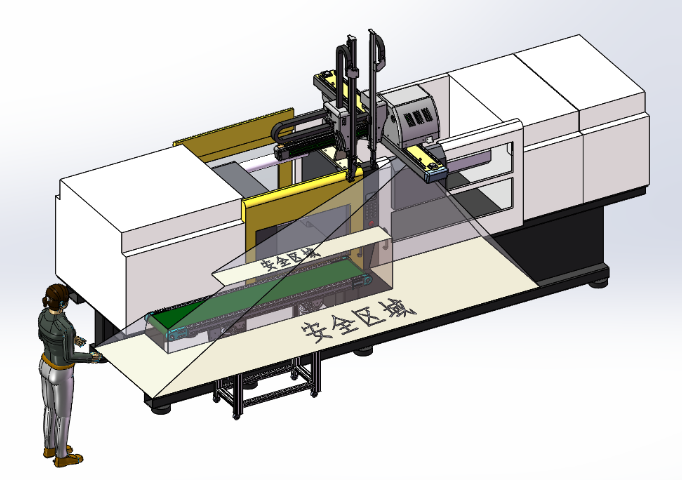
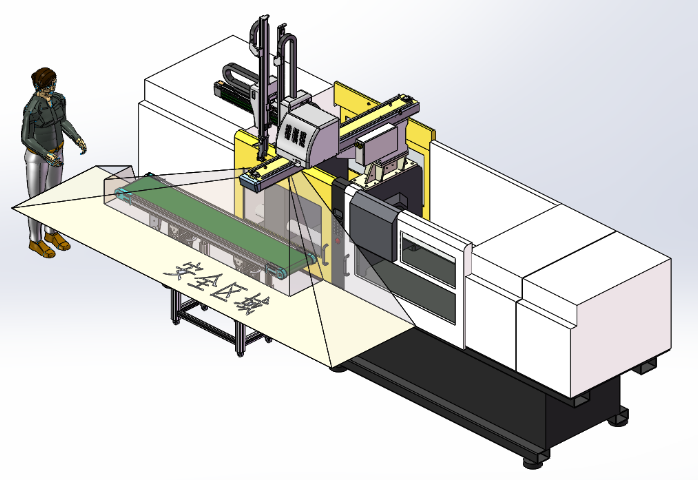
立体空间防护传感器在机械手工作区域中起到安全防护与避障作用。机械手在自动运行过程中,其工作半径内可能存在人员进出或工具摆放的情况。传感器实时监测机械手周围的空间区域,当检测到人员或物体进入预设的危险边界时,立即向控制系统发出信号。控制系统收到信号后触发机械手减速或完全停止。这种机制避免了机械手与人员或其他设备发生碰撞。在机械手与操作人员共享工作区域的场合,传感器能够区分人体与设备运动部件。操作人员在正常作业时不会触发不必要的停机,而一旦肢体越过安全界线,设备响应在毫秒级别内完成。传感器采用激光或超声波技术,对不同材质的目标均有响应。安装位置通常选择在机械手底座或末端执行器附近,监测范围根据实际工况调节。维护人员每两周检查一次传感器表面清洁度,使用软布***油污和粉尘。供电电压为12至24伏直流,输出信号类型包含开关量和模拟量。上海机械手安全防护防撞传感器智能调节适用于整厂智能化安全防护,提升工厂整体安全等级。

行吊设备在重工业车间中用于吊运钢材、铸件等物料。行吊的大车沿厂房长度方向移动,小车沿大车横梁移动,吊钩上下升降。立体空间防护传感器安装在大车端梁和小车架体上。传感器监测行吊运行前方是否有人员、设备或物料堆放。当大车向前移动时,前方传感器持续测量与**近障碍物的距离。距离数值在操作室内的显示屏上实时更新。当距离小于安全阈值时,声光报警器启动,提示操作人员注意。操作人员未及时减速的情况下,传感器触发自动减速电路,大车电机转速自动下降。距离继续缩短至极限值时,制动器直接吸合,大车停止。传感器对金属和非金属障碍物均有响应能力。检测到悬挂的钢索或软性遮挡物时,输出信号同样有效。在粉尘较多的铸造车间,传感器外壳采用密封结构,内部电子元件不与外界空气接触。进气口装有过滤网,防止粉尘积累影响探测精度。
立体空间防护传感器在橡胶轮胎硫化机中用于检测模具开合状态。硫化机的模具分为上下两部分,合模时模具闭合形成密闭型腔,开模时模具分离取出轮胎。传感器安装在上模边缘的四个角,检测下模对应位置的距离。合模过程中传感器持续测量上下模之间的距离,距离数值不断减小。当四个角的距离值均小于0.5毫米且相互差异不超过0.1毫米时,控制系统判断模具已经闭合到位。此时硫化机开始保压加热。开模时传感器距离数值增大,达到50毫米时控制系统判断开模完成,允许机械手进入取胎。传感器采用激光三角测量原理,适用于近距离高精度检测。测量范围为零至100毫米,分辨率为0.01毫米。传感器输出的模拟量信号为0至10伏电压,送入可编程控制器的模拟量输入模块。硫化机工作温度较高,模具区域温度达到180摄氏度。传感器安装位置距离模具150毫米处,该处环境温度为70摄氏度。传感器外壳选用耐高温聚酰胺材料,内部电路板涂覆三防漆。维护人员每月校准一次传感器零点,使用标准量块置于检测距离处,调整传感器内部电位器使输出电压与标称值一致。智慧停车系统应用,检测人员误入车道联动报警。
同一台设备在不同生产阶段可能需要不同的防护方案。例如,机械手在自动运行模式下需要***防护,在调试模式下则需要临时放宽某些区域的限制。大德恒通防撞传感器支持多个防护场景的**存储与一键切换,每个场景可保存完全不同的区域形状、大小、灵敏度和输出逻辑。场景切换可通过外部IO信号触发,也可通过软件远程调用。这意味着,一台传感器可以替代多台不同配置的传感器,既降低了硬件成本,也简化了设备管理。对于需要频繁换产的柔性生产线,这一功能尤为实用。工业机器人可用防撞方案,随动随停,保护人机协作安全。湖北激光防护防撞防护防撞传感器技术指导
提供标准安装支架与高柔电缆,适配各类安装场景。江苏机械手失控传感器多组信号输入
立体空间防护传感器在焊接机器人工作站中的应用体现在安全防护方面。焊接机器人在进行弧焊作业时,其运动范围覆盖工件台及周边区域。操作人员需要靠近工作站进行工件装卸。传感器安装在机器人上方的横梁或立柱上,监测下方空间。当人员弯腰进入工作区域时,传感器检测到人体轮廓,输出信号到安全继电器。机器人焊接电源输出被切断,焊枪停止放电。同时机器人运动轴进入暂停状态。待人员退出监测区域后,按下复位按钮机器人恢复动作。传感器采用飞行时间测量原理,发射近红外波段的激光脉冲。脉冲宽度为5纳秒,峰值功率满足工业环境下的抗干扰要求。接收端采用单光子雪崩二极管阵列,能够探测微弱回波信号。传感器外壳为压铸铝材质,表面喷塑处理。防护等级为IP67,能抵抗焊接飞溅物的附着。维护人员每周使用铜丝刷清理传感器表面的飞溅颗粒,避免堆积影响探测窗口透光率。供电电压为24伏直流,消耗电流为150毫安。输出形式为两个PNP开关量通道,一个用于预警,一个用于停车。江苏机械手失控传感器多组信号输入
深圳市大德恒通科技有限公司是一家有着雄厚实力背景、信誉可靠、励精图治、展望未来、有梦想有目标,有组织有体系的公司,坚持于带领员工在未来的道路上大放光明,携手共画蓝图,在广东省等地区的机械及行业设备行业中积累了大批忠诚的客户粉丝源,也收获了良好的用户口碑,为公司的发展奠定的良好的行业基础,也希望未来公司能成为*****,努力为行业领域的发展奉献出自己的一份力量,我们相信精益求精的工作态度和不断的完善创新理念以及自强不息,斗志昂扬的的企业精神将**深圳市大德恒通科技供应和您一起携手步入辉煌,共创佳绩,一直以来,公司贯彻执行科学管理、创新发展、诚实守信的方针,员工精诚努力,协同奋取,以品质、服务来赢得市场,我们一直在路上!