移动机器人在仓库和车间内行驶时,立体空间防护传感器为其提供环境感知与定位能力。机器人需要知道前方通道是否有障碍物、两侧货架之间的距离是否足够通过、地面是否有凹陷或凸起。传感器发射探测波束,覆盖机器人周围的三维空间。回波信号被接收后,内部处理器计算出障碍物的距离和方位。这些信息被传递给导航系统,用于实时更新机器人的行进路径。当传感器检测到前方有静态障碍物如货架立柱时,机器人提前规划绕行路线。当检测到动态障碍物如其他移动设备或人员时,机器人降低速度并等待障碍物离开。在狭窄通道中,传感器测量两侧剩余空间,确保车体不会刮擦货架。传感器的探测距离可根据环境调整,**短为0.1米,**长为10米。外壳防护等级为IP65,抵抗车间内的灰尘和水汽。安装时需确保传感器视野不被车体自身结构遮挡。适用于整厂智能化安全防护,提升工厂整体安全等级。广东人形防护防撞传感器场景适配
立体空间防护传感器在自动弯管机中用于检测管材进给长度。管材由送料机构夹持向前推进,到达设定长度后弯管机构动作将其弯曲。传感器安装在送料机构后方的机架上,测量管材端面与传感器之间的距离。送料过程中距离值逐渐减小,达到设定值时停止进给。传感器采用激光测距原理,测量范围为100至1000毫米,分辨率为1毫米。激光光斑在8米距离处直径约为6毫米,在短距离测量时光斑更小,能够精确照射管材端面。管材端面可能不平整或有毛刺,对激光反射有一定影响。传感器内部算法对连续多次测量值进行中值滤波,去除因端面不平造成的异常值。滤波窗口宽度为5次测量,输出值为中间值。弯管机加工节拍为每分钟6根,传感器测量频率为每秒20次,满足节拍要求。在管材弯曲过程中产生的振动传递到传感器安装位置,支架使用橡胶垫圈隔离振动。橡胶垫圈硬度为邵氏A50,厚度5毫米。传感器外壳为铝合金,表面阳极氧化。接线口为M12防水接头,防护等级IP67。输出为开关量及模拟量双通道,开关量用于到位信号,模拟量用于连续位置反馈。供电为18至30伏直流,消耗电流小于150毫安。中国香港冲压防护防撞传感器可切换多场景防护区域实现随动随停功能,人员进入即停,离开即恢复。

桁架机器人在多台机床组成的柔性生产线中承担工件搬运任务。机器人的横梁长度可达数十米,立柱高度超过3米。立体空间防护传感器安装在移动滑座的两端,随滑座一起运动。滑座在横梁上移动时,传感器检测前方轨道上是否有其他滑座或维修人员。当两个滑座相向而行时,各自的前方传感器测量两者之间的距离。距离小于2米时,两个滑座的速度同时降低。距离小于0.5米时,两个滑座的驱动电机同时停止。这种双向避撞机制不需要**控制器协调,传感器之间通过无线通信交换距离信息。传感器内部集成2.4吉赫兹无线模块,通信距离为50米。无线信道占用时间短,数据传输延迟小于10毫秒。传感器供电取自滑座上的24伏直流母线。断电时传感器内部电容储存的余电维持无线模块发送***一次位置信息。导轨末端安装有机械止挡,作为传感器失效情况下的后备防护。传感器的每日自检功能在设备启动时自动执行,自检通过后允许滑座移动。
立体空间防护传感器在粉末冶金压机中用于检测填料高度。金属粉末被填入阴模型腔后,上模冲下压将粉末压制成形。传感器安装在阴模上方,测量填粉后的粉面高度。粉面高度应保持在设定值的正负0.2毫米范围内。高度超出范围时压出的零件密度不合格。传感器在每次填粉后、上模冲下压前进行一次测量。测量值超出允许范围时,压机停止动作并发出报警,等待操作人员调整送粉靴的行程。传感器采用激光三角测量原理,测量范围为10至30毫米,分辨率为0.01毫米。激光波长为650纳米,红色光斑直径为0.5毫米。金属粉末表面粗糙,对激光产生漫反射。传感器接收透镜收集漫反射光,在光电探测器上成像。粉面高度变化时成像位置改变,通过计算像移得出高度值。传感器的测量不受粉末颜色的影响。黑色铁粉和有色金属粉末的测量结果一致。传感器窗口配备压缩空气吹扫装置,防止粉末飘落污染透镜。吹扫气压为0.1兆帕,每次测量前自动吹扫0.5秒。外壳防护等级为IP54,供电为24伏直流。输出为RS485通信接口,与压机控制器交换数据。多场景存储一键切换,一套传感器应对不同工位防护需求。

冲压自动化生产线中,拆垛机械手从料垛顶部抓取板料送入清洗机和涂油机。立体空间防护传感器安装在机械手抓取头侧面,检测料垛顶部板料的高度位置。随着板料被逐张取走,料垛高度逐渐下降。传感器测量抓取头与板料表面之间的距离,距离值被用于控制机械手的下降行程。当距离大于设定值时,机械手下降幅度增加。距离小于设定值时下降幅度减小。这种闭环控制使抓取头每次都以相同的高度接触板料表面,避免冲击过大损伤板料或抓取头。传感器也能检测料垛是否倾斜。四个传感器分别安装在抓取头四周,同时测量各自与板料表面的距离。四个距离值相差超过5毫米时,判断料垛倾斜。控制系统发出报警并停止取料,等待人工整理料垛。传感器在板料表面有油膜覆盖时仍能正常工作。油膜厚度不超过0.1毫米时对激光反射率的影响可以忽略。油膜较厚时传感器自动增加发射功率,保持接收信号幅度稳定。传感器的输出为模拟量4至20毫安信号,与机械手控制器的模拟量输入模块直接连接。千兆以太网通讯,数据高速传输,响应更快更可靠。中国台湾冲压机防护防撞传感器多组信号输入
高光谱精密算法,复杂光照条件下依然稳定识别。广东人形防护防撞传感器场景适配
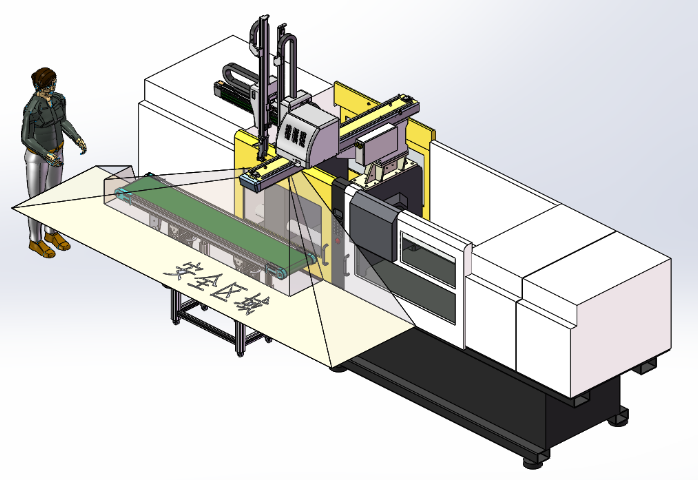
桁架机器人在自动化加工单元中承担工件上下料任务。机器人的横梁和立柱构成框架结构,移动部件沿轨道运行。立体空间防护传感器用于检测移动部件运行轨迹上的障碍物。在机器人高速移动时,如果轨道末端有人员站立或料架位置偏移,传感器能够在碰撞发生前检测到异常。传感器的工作方式包含主动探测和被动接收两种模式。主动模式发射红外或激光脉冲,根据反射时间计算距离。被动模式接收目标发出的红外辐射,用于检测人员存在。两种模式可根据环境光照条件切换。在夜间或低照度车间,主动模式保持正常工作。在白天或强光照射区域,被动模式的灵敏度适当降低以避免误触发。传感器的输出信号直接连接到桁架机器人的安全继电器。安全继电器切断动力电源时,设备所有运动轴同时制动。安装支架设计为可调节角度,使传感器波束覆盖需要监测的区域。维护人员每月检查一次安装螺栓是否松动。广东人形防护防撞传感器场景适配
深圳市大德恒通科技有限公司是一家有着雄厚实力背景、信誉可靠、励精图治、展望未来、有梦想有目标,有组织有体系的公司,坚持于带领员工在未来的道路上大放光明,携手共画蓝图,在广东省等地区的机械及行业设备行业中积累了大批忠诚的客户粉丝源,也收获了良好的用户口碑,为公司的发展奠定的良好的行业基础,也希望未来公司能成为*****,努力为行业领域的发展奉献出自己的一份力量,我们相信精益求精的工作态度和不断的完善创新理念以及自强不息,斗志昂扬的的企业精神将**深圳市大德恒通科技供应和您一起携手步入辉煌,共创佳绩,一直以来,公司贯彻执行科学管理、创新发展、诚实守信的方针,员工精诚努力,协同奋取,以品质、服务来赢得市场,我们一直在路上!