立体空间防护传感器在饮料灌装生产线中用于检测空瓶输送是否堵塞。空瓶经过洗瓶机后由螺旋分瓶器送入灌装机的进瓶星轮。传感器安装在输瓶链道上方,向下检测瓶子通过情况。链道正常运行时瓶子连续通过,传感器输出持续的脉冲信号。脉冲频率由控制器监测。脉冲频率低于正常值的百分之五十时,表示上游来瓶不足。脉冲频率高于正常值的百分之一百五十时,表示下游有堵塞导致瓶子堆积。控制器根据频率变化判断堵塞位置,启动对应位置的震动器或调整输瓶链道速度。传感器采用漫反射光电原理,检测距离为50至200毫米可调。瓶身为透明PET材料,普通光电传感器难以可靠检测。该传感器使用蓝光LED作为光源,波长470纳米。透明材料对蓝光的吸收率较高,反射信号强度足以触发输出。传感器灵敏度通过电位器调节,对透明瓶和有色瓶均能检出。在灌装区域湿度较高的环境下,传感器窗口定期加热防止结露。加热功率为2瓦,由温度控制器自动启停。维护人员每月使用标准反射板验证传感器检测距离,反射板由陶瓷制成,反射率稳定。矿山设备加装,抗震防尘,适应恶劣工况。中国台湾激光防护防撞防护防撞传感器多组信号输入
立体空间防护传感器在粉末冶金压机中用于检测填料高度。金属粉末被填入阴模型腔后,上模冲下压将粉末压制成形。传感器安装在阴模上方,测量填粉后的粉面高度。粉面高度应保持在设定值的正负0.2毫米范围内。高度超出范围时压出的零件密度不合格。传感器在每次填粉后、上模冲下压前进行一次测量。测量值超出允许范围时,压机停止动作并发出报警,等待操作人员调整送粉靴的行程。传感器采用激光三角测量原理,测量范围为10至30毫米,分辨率为0.01毫米。激光波长为650纳米,红色光斑直径为0.5毫米。金属粉末表面粗糙,对激光产生漫反射。传感器接收透镜收集漫反射光,在光电探测器上成像。粉面高度变化时成像位置改变,通过计算像移得出高度值。传感器的测量不受粉末颜色的影响。黑色铁粉和有色金属粉末的测量结果一致。传感器窗口配备压缩空气吹扫装置,防止粉末飘落污染透镜。吹扫气压为0.1兆帕,每次测量前自动吹扫0.5秒。外壳防护等级为IP54,供电为24伏直流。输出为RS485通信接口,与压机控制器交换数据。山东立体防护防撞传感器售后服务体积小巧,安装不占空间,释放生产线布局灵活性。

整厂自动化生产线往往由多台设备、多个工位、多种类型机器人组成,安全防护需要统一规划、协同联动。大德恒通防撞传感器可作为整厂安全网络中的智能节点,每台传感器**检测各自区域,同时通过以太网将所有传感器的状态汇总到**监控平台。当某台传感器触发报警时,**平台可根据预设逻辑,决定是否联动周边设备同步停止,避免局部事故扩大。传感器还支持与安全光栅、安全门锁、围栏等传统防护设备混合使用,形成多层次、立体化的安全防护体系。这种系统化部署能力,使得大德恒通不*提供单品,更能提供整厂安全解决方案。
立体空间防护传感器在木材加工的五轴加工中心中用于检测刀具断裂。加工中心主轴高速旋转带动刀具切削木材,刀具断裂后机床继续运行会造成工件损坏。传感器安装在主轴附近,对准刀具位置。刀具完好时传感器探测到刀具的存在,输出信号为1。刀具断裂后传感器探测范围内无金属目标,输出信号变为0。控制系统收到信号变化后立即停止主轴旋转和进给运动。传感器采用电感式接近原理,检测距离为4毫米,检测对象为铁质或硬质合金刀具。刀具旋转时对传感器输出没有影响,因为检测电路响应时间较慢,无法跟随高速旋转的刀具形状变化。传感器输出的是刀具是否存在的平均信息。不同直径的刀具需要调整传感器安装位置,使刀具与传感器感应面的距离保持在检测范围内。安装支架设计为长槽孔结构,可调节范围为正负10毫米。在木屑较多的环境中,传感器表面定期用压缩空气吹扫,防止木屑堆积在感应面。木屑潮湿时可能影响电感传感器的振荡幅度,吹扫气压设定为0.3兆帕,每两小时自动吹扫一次。传感器供电为10至30伏直流,消耗电流10毫安,输出形式为PNP常开。拥有发明**(ZL 2022 1 0048883.8),主要技术自主可控。

在AI大模型防撞传感器中,传感器需要采集人体图像以进行识别。大德恒通高度重视数据安全,在产品设计之初就遵循隐私保护原则。所有图像数据在设备本地进行处理和识别,不上传云端,不存储原始视频流。传感器内置的高算力AI芯片完成全部推理计算,无需额外算力设备,也避免了数据在网络传输过程中被截获的风险。个人数据(如人体轮廓、姿态等)加密存储于设备内部,*用于实时安全判断,不做其他用途。对于注重数据合规的企业而言,这种端侧计算、本地处理的设计,既满足了安全防护需求,也符合数据保护相关法规的要求。粉色与橙色为第二组输出,支持常闭干接点信号。冲压机防护防撞传感器多组信号输入
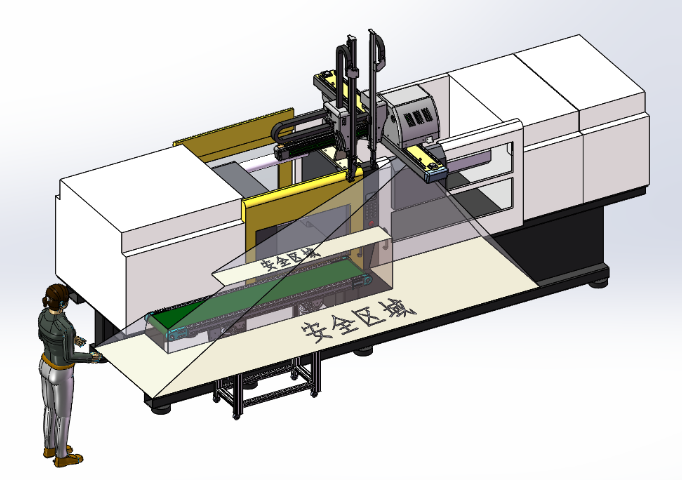
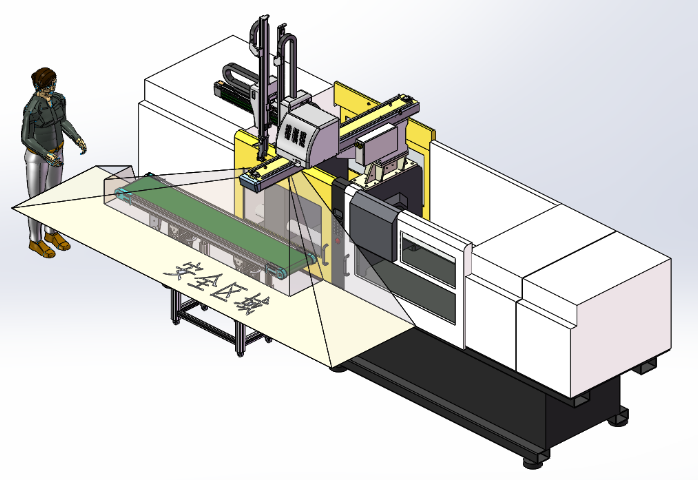
3D立体空间防护技术,自定义长宽高区域,实现无死角主动防撞。中国台湾激光防护防撞防护防撞传感器多组信号输入
注塑车间机械手从模具中取出注塑件后,需要将注塑件放入输送带或料箱。立体空间防护传感器安装在机械手夹具的侧面,检测注塑件是否在夹具上脱落。机械手开模后进入模具内部取件,夹具闭合夹住注塑件。在机械手退出模具的过程中,传感器持续监测夹具与注塑件之间的相对位置。注塑件从夹具上滑落时,传感器探测到的距离突然增大。控制系统收到距离变化信号后,停止机械手后续动作。机械手保持当前姿态等待人工处理。这种检测避免了空夹具继续进行放置动作,防止后续工序出现空料情况。传感器也能检测模具内是否有残留的注塑件。机械手取件完成后,传感器在模具闭合前快速扫描模具型腔。型腔内若有残留物,反射信号特征与空腔不同,传感器输出禁止合模信号。注塑机顶针保持顶出状态,等待操作人员清理。传感器的响应时间设定为10毫秒,与机械手动作速度匹配。安装时传感器探头与夹具边缘保持齐平,避免探头被工件碰撞。中国台湾激光防护防撞防护防撞传感器多组信号输入
深圳市大德恒通科技有限公司是一家有着先进的发展理念,先进的管理经验,在发展过程中不断完善自己,要求自己,不断创新,时刻准备着迎接更多挑战的活力公司,在广东省等地区的机械及行业设备中汇聚了大量的人脉以及**,在业界也收获了很多良好的评价,这些都源自于自身的努力和大家共同进步的结果,这些评价对我们而言是比较好的前进动力,也促使我们在以后的道路上保持奋发图强、一往无前的进取创新精神,努力把公司发展战略推向一个新高度,在全体员工共同努力之下,全力拼搏将共同深圳市大德恒通科技供应和您一起携手走向更好的未来,创造更有价值的产品,我们将以更好的状态,更认真的态度,更饱满的精力去创造,去拼搏,去努力,让我们一起更好更快的成长!