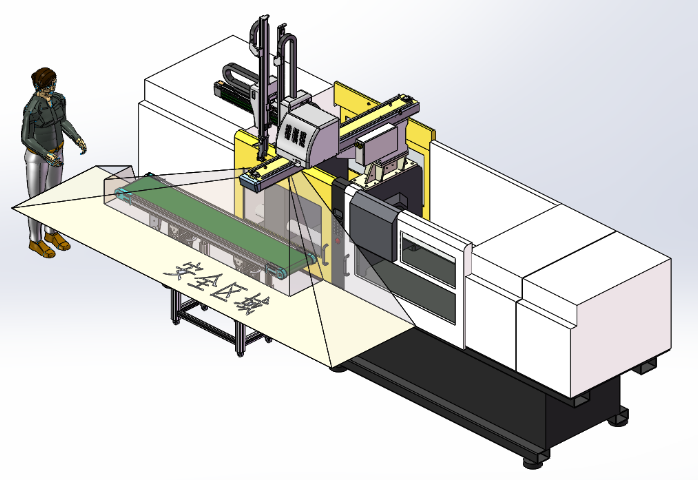
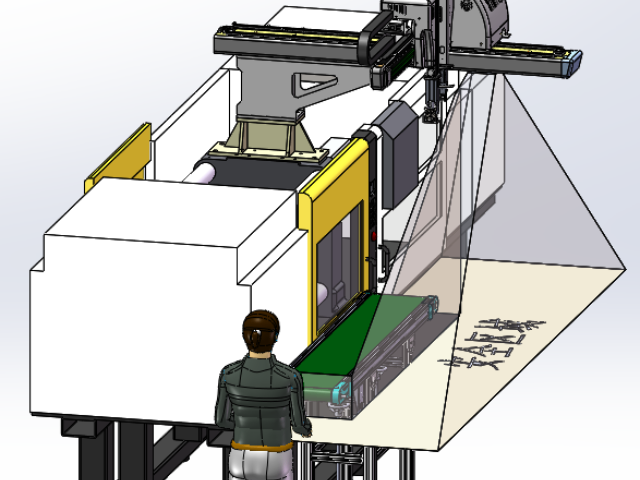
立体空间防护传感器在焊接机器人工作站中的应用体现在安全防护方面。焊接机器人在进行弧焊作业时,其运动范围覆盖工件台及周边区域。操作人员需要靠近工作站进行工件装卸。传感器安装在机器人上方的横梁或立柱上,监测下方空间。当人员弯腰进入工作区域时,传感器检测到人体轮廓,输出信号到安全继电器。机器人焊接电源输出被切断,焊枪停止放电。同时机器人运动轴进入暂停状态。待人员退出监测区域后,按下复位按钮机器人恢复动作。传感器采用飞行时间测量原理,发射近红外波段的激光脉冲。脉冲宽度为5纳秒,峰值功率满足工业环境下的抗干扰要求。接收端采用单光子雪崩二极管阵列,能够探测微弱回波信号。传感器外壳为压铸铝材质,表面喷塑处理。防护等级为IP67,能抵抗焊接飞溅物的附着。维护人员每周使用铜丝刷清理传感器表面的飞溅颗粒,避免堆积影响探测窗口透光率。供电电压为24伏直流,消耗电流为150毫安。输出形式为两个PNP开关量通道,一个用于预警,一个用于停车。防护区域高度、长度、宽度均可自定义,适应多变工况。甘肃防护防撞传感器代理价钱
冲压自动化生产线中,拆垛机械手从料垛顶部抓取板料送入清洗机和涂油机。立体空间防护传感器安装在机械手抓取头侧面,检测料垛顶部板料的高度位置。随着板料被逐张取走,料垛高度逐渐下降。传感器测量抓取头与板料表面之间的距离,距离值被用于控制机械手的下降行程。当距离大于设定值时,机械手下降幅度增加。距离小于设定值时下降幅度减小。这种闭环控制使抓取头每次都以相同的高度接触板料表面,避免冲击过大损伤板料或抓取头。传感器也能检测料垛是否倾斜。四个传感器分别安装在抓取头四周,同时测量各自与板料表面的距离。四个距离值相差超过5毫米时,判断料垛倾斜。控制系统发出报警并停止取料,等待人工整理料垛。传感器在板料表面有油膜覆盖时仍能正常工作。油膜厚度不超过0.1毫米时对激光反射率的影响可以忽略。油膜较厚时传感器自动增加发射功率,保持接收信号幅度稳定。传感器的输出为模拟量4至20毫安信号,与机械手控制器的模拟量输入模块直接连接。天津3D立体空间安全防护防撞传感器机械手取放料时,防撞传感器不会因工件通过而误停。

自动化喷涂生产线中,悬挂链输送工件经过喷房。立体空间防护传感器安装在喷房入口处,检测工件是否到达预定位置。工件随悬挂链移动,到达喷房入口时光电传感器触发,喷枪开始喷涂。传感器采用对射式光电原理,发射器与接收器分别安装在输送链两侧。工件通过时遮挡光束,接收器输出开关信号。喷涂过程中产生的漆雾会附着在传感器窗口上,影响透光率。传感器窗口配备气幕装置,压缩空气从窗口周围的小孔持续吹出,在窗口表面形成气帘。漆雾颗粒随气流带走,不直接接触窗口玻璃。压缩空气压力设定为0.3兆帕,消耗气量为每分钟50升。当压缩空气供应中断时,传感器自动切换到低灵敏度模式。低灵敏度模式下的检测距离缩短,但能暂时维持工作直到压缩空气恢复。传感器外壳采用不锈钢材质,表面光滑不易挂漆。每周停产维护时,操作人员使用蘸有稀释剂的软布擦拭传感器外壳,去除干固的漆膜。擦拭时注意不要让稀释剂渗入接线端口。传感器供电为24伏直流,输出形式为继电器触点,触点容量为2安培。
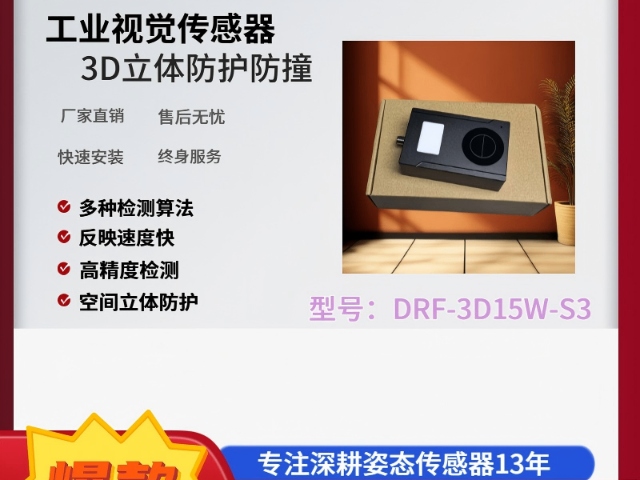
安全设备**怕的是“坏了没人知道”,一旦失效而未被发现,就形成了安全隐患。大德恒通防撞传感器内置故障自诊断功能,可实时监测传感器工作状态、通信状态、电源状态等关键参数。当出现异常(如摄像头遮挡、网络中断、供电不稳等),传感器会通过指示灯、蜂鸣器或输出信号向控制系统发出报警,提示人员及时检查。在软件界面上,用户也可直观看到各防护区域的实时检测状态和信号输出情况。这种透明化的健康管理,大幅降低了因安全设备本身故障而导致的风险。结合定期固件升级和软件维护,防撞传感器能够在整个生命周期内保持可靠的防护性能,真正让用户“装得放心、用得安心”。8芯标准出线,接线简单,棕色接24V,蓝色接0V即可。
协作机器人工作区域中,立体空间防护传感器为智能决策提供支持。传感器内部集成算法,能够直接输出通行、减速或停车等控制信号,不需要外部控制器进行额外运算。传感器实时采集周围空间的点云数据,这些数据描述了人员或物体在三维空间中的位置和轮廓。内置处理器分析点云信息,判断目标与机器人之间的**小距离。根据距离数值,处理器决定输出何种控制信号。距离大于安全作业区时输出通行信号,机器人保持设定速度运行。距离进入预警区时输出减速信号,机器人速度降低至原速度的百分之三十。距离进入危险区时输出停车信号,机器人运动完全停止。整个处理过程在传感器内部完成,从信号采集到决策输出用时小于30毫秒。这种架构缩短了感知到执行的链条长度,提高了响应速度。传感器的决策阈值可通过外部调试软件设定。操作人员根据现场情况调整三个区域的边界距离。应用于医疗设备区域,实现高危区域智能安全管控。贵州激光防护传感器代理价钱
支持轮廓识别、距离警告、空间判断等多种检测算法融合判断。甘肃防护防撞传感器代理价钱
立体空间防护传感器在铸件清理打磨工作站中用于检测砂轮磨损情况。打磨机器人末端装有砂轮,对铸件表面进行打磨。砂轮在使用过程中直径逐渐减小,影响打磨位置精度。传感器安装在机器人臂上靠近砂轮的位置,测量砂轮外缘与参考点之间的距离。初始状态下砂轮直径为200毫米,传感器测量距离为50毫米。砂轮磨损后直径减小,传感器测量距离增加。当测量距离增加到55毫米时,控制系统自动补偿机器人轨迹,使砂轮与铸件的接触位置保持不变。当测量距离增加到60毫米时,控制系统判断砂轮已到达使用寿命,发出更换提示。机器人停止打磨动作,移动到工具更换站等待操作人员更换砂轮。传感器采用激光位移原理,分辨率为0.01毫米。激光光斑尺寸为0.5毫米×1毫米,能够精确照射砂轮外缘。打磨过程中产生的粉尘会沉降在传感器窗口上,传感器的气幕防尘系统使用0.2兆帕压缩空气持续吹扫窗口。防尘系统与机器人动作联动,机器人打磨时气幕开启,机器人待机时气幕关闭以节约压缩空气。传感器外壳防护等级IP65,供电为24伏直流。输出信号为4至20毫安电流,采用三线制连接方式。甘肃防护防撞传感器代理价钱
深圳市大德恒通科技有限公司汇集了大量的优秀人才,集企业奇思,创经济奇迹,一群有梦想有朝气的团队不断在前进的道路上开创新天地,绘画新蓝图,在广东省等地区的机械及行业设备中始终保持良好的信誉,信奉着“争取每一个客户不容易,失去每一个用户很简单”的理念,市场是企业的方向,质量是企业的生命,在公司有效方针的领导下,全体上下,团结一致,共同进退,**协力把各方面工作做得更好,努力开创工作的新局面,公司的新高度,未来深圳市大德恒通科技供应和您一起奔向更美好的未来,即使现在有一点小小的成绩,也不足以骄傲,过去的种种都已成为昨日我们只有总结经验,才能继续上路,让我们一起点燃新的希望,放飞新的梦想!