点胶机器人在使用过程中如何避免胶水堵塞?存放环境:胶水的存放环境应干燥、清洁,避免阳光直射和高温。长时间存放的胶水应定期检查和搅拌,以防止其发生沉淀或固化。定期检查:定期对点胶机器人进行全方面检查,包括电气系统、机械部件以及胶水供给系统等。及时发现并处理潜在问题,确保设备的正常运行。培训操作人员:对点胶机器人的操作人员进行专业培训,使其熟练掌握设备的操作技巧和维护方法。提高操作人员的技能水平,有助于减少因操作不当导致的胶水堵塞问题。记录和分析:对点胶机器人的使用情况进行记录和分析,包括胶水使用情况、堵塞发生频率以及处理措施等。通过分析数据,可以找出胶水堵塞的规律和原因,为后续的改进和优化提供依据。点胶机器人提高了生产效率,减少了人力成本。单平台点胶机器人运动视觉

点胶机器人的工作效率非常高。首先,点胶机器人具有高速度和高精度的特点,能够在短时间内完成大量的点胶任务。它们可以根据预设的程序和参数进行自动化操作,无需人工干预,从而提高了工作效率。其次,点胶机器人具有快速响应和准确定位的能力。它们可以根据工件的形状和尺寸进行自动调整和适应,确保胶水的精确涂布位置和厚度。这种精确性可以很大程度减少胶水的浪费,并提高产品的质量和一致性。此外,点胶机器人还可以进行多任务操作。它们可以同时进行多个点胶任务,而不会出现疲劳或错误。这种多任务操作的能力可以进一步提高工作效率,减少生产时间和成本。总的来说,点胶机器人的工作效率非常高,能够快速、准确地完成大量的点胶任务。它们的自动化操作、快速响应和准确定位的能力,以及多任务操作的特点,使其成为现代制造业中不可或缺的重要工具。义乌省电点胶机器人诚信经营点胶机器人在工作时噪音低,保证了工作环境安静。

点胶机器人在现代工业生产中发挥着至关重要的作用,它们能够精确、高效地执行点胶作业,极大提升了生产效率和产品质量。然而,胶水堵塞作为点胶机器人使用过程中常见的问题之一,不仅会影响生产效率,还可能对设备造成损害。因此,如何避免胶水堵塞成为了点胶机器人应用中需要重点关注和解决的问题。控制胶水的压力和流量:点胶机器人通过精确控制胶水的压力和流量来实现稳定的点胶作业。因此,在使用过程中,应根据胶水的特性和生产需求,合理调整压力和流量参数。避免压力过大或过小导致胶水流速过快或过慢,从而引发堵塞问题。
点胶机器人的工作原理主要基于计算机视觉和精密机械控制。通过视觉系统识别工件的位置和姿态,控制系统根据识别结果规划出合适的点胶轨迹,并驱动机器人按照轨迹进行点胶作业。同时,控制系统还实时监控点胶过程中的各种参数,如点胶速度、点胶量等,以确保点胶精度的稳定性。控制环境因素:在点胶作业过程中,应严格控制环境因素,如保持恒定的温度和湿度。此外,还可以采用温度补偿、湿度控制等技术手段,减小环境因素对点胶精度的影响。实施质量检测与反馈:在点胶作业过程中,应实施质量检测,对点胶效果进行实时监测和评估。一旦发现点胶精度不符合要求,应立即进行反馈和调整,确保点胶质量的稳定性。点胶机器人的稳定性,保证了生产的连续性和稳定性。

超高速点胶机器人作为一种重要的自动化生产设备,普遍应用于电子、汽车、医疗等领域。其主要功能是实现精确、高效的点胶作业,以满足现代工业对高精度、高质量产品的需求。然而,点胶精度受到多种因素的影响,如何保证点胶机器人的点胶精度成为了一个亟待解决的问题。本文将从点胶机器人的结构、工作原理、点胶精度的影响因素以及保证点胶精度的措施等方面,详细探讨点胶机器人如何保证点胶精度。点胶机器人主要由机械结构、控制系统、驱动系统和点胶系统组成。机械结构包括基座、臂部、手腕和末端执行器等部分,负责实现点胶作业的空间位置和姿态调整。控制系统是点胶机器人的中心,负责接收并处理输入指令,控制机器人的运动轨迹、速度和加速度等参数。驱动系统为机器人提供动力,通过电机、减速器等部件实现机器人的运动。点胶系统则负责将胶水按照预设的轨迹和参数进行点胶作业。点胶机器人的工作效率高,大幅提升了产能。四会新能源点胶机器人
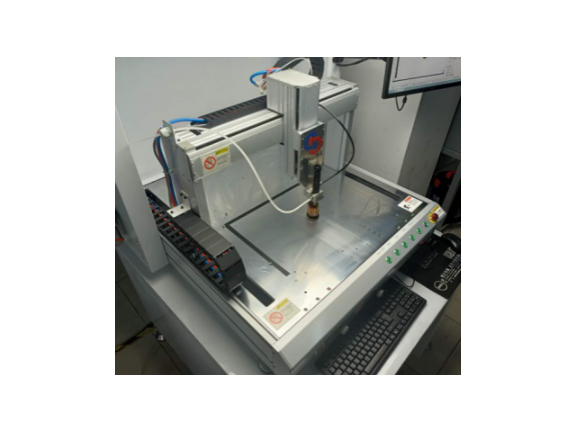
点胶机器人可灵活调整参数,适应不同产品的生产需求。单平台点胶机器人运动视觉
点胶机器人可以进行多轴运动。多轴运动是指机器人能够在多个轴向上进行运动,以实现更复杂的操作和精确的定位。点胶机器人通常具有至少三个轴向,即X轴、Y轴和Z轴,用于控制机器人在平面上的移动和垂直方向的运动。此外,一些高级的点胶机器人还可以具备旋转轴、倾斜轴等额外的轴向,以实现更灵活的运动。多轴运动使得点胶机器人能够在三维空间内进行精确的定位和运动控制。通过控制各个轴向的运动,点胶机器人可以实现复杂的路径规划和运动轨迹,以满足不同工件的点胶需求。例如,可以通过控制X轴和Y轴的运动来控制点胶头在平面上的移动,通过控制Z轴的运动来控制点胶头的高度,从而实现精确的点胶操作。多轴运动还可以使点胶机器人具备更高的灵活性和适应性。通过控制不同轴向的运动,点胶机器人可以适应不同形状和尺寸的工件,实现精确的点胶操作。同时,多轴运动还可以提高点胶的速度和效率,减少生产时间和成本。总之,点胶机器人可以进行多轴运动,通过控制各个轴向的运动,实现精确的定位和运动控制,提高点胶的精度、速度和效率。单平台点胶机器人运动视觉