堆垛机的应用:堆垛机立柱的摆动的情况与水平轴的调速参数有很大的关系。如果横轴调速启动过猛,或者停车过猛,都会使堆垛机立柱摆动幅度较大,会导致装载平台的货物位移,横轴驱动机构磨损严重,降低堆垛机的安全性,缩短其使用时间。因此,调速完成后,需要保证堆垛机水平轴的调速过程稳定,满足生产效率要求。矢量变频器友好的调试软件及其调速的稳定性,提高了水平轴的调速的效率,便于维护,为后期的稳定应用打下了良好的基础。堆垛机的定位系统支持编程,通讯方式安全可靠、效率高,系统参数完善。河北自动堆垛机厂家供应

堆垛机水平轴调速要求:堆垛机因其本体机械结构的特殊性,运行过程中载货台和货物对立柱的弯矩、堆垛机加减速产生的水平惯性力等都会使立柱在巷道平面内产生挠曲变形,影响堆垛机运行的稳定性、可靠性,使堆垛机水平轴方向的运行速度、运行加速度的调试也变得复杂。水平轴变频器调速要满足堆垛机加速过程平稳、短时间内加到较大速度且高速运行到目的地址时以较短的减速距离准确停车,整个过程堆垛机运行要可靠、平稳。堆垛机性能参数:较大载重量1000kg,运行轴**速度160m/min,运行轴加速度0.5m/s2。上海立体仓库堆垛机供应商家巷道式堆垛起重机的组成有:起升机构、运行机构、货台司机室和机架等,起升机构采用的是钢丝绳或链条提升。

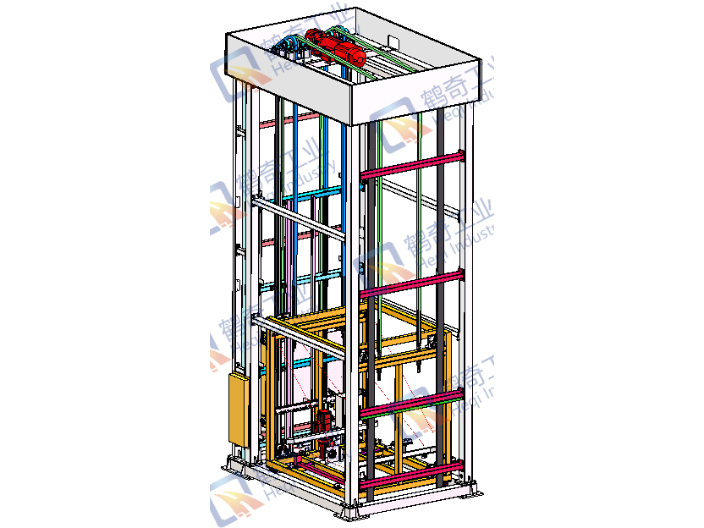
堆垛机在X方向的定位通过条形码定位系统行进,并通过光电管进行精细定位。E-Stoplimit开关用于在堆垛机工作范围的后一端立即关闭堆垛机。桅杆设计为箱体结构,板材和型材焊接结构。支柱安装在运输部件上,并通过上十字头在顶部连接。在桅杆1上,安装了控制柜平台和起重机平台。带有制动电阻器的平台安装在桅杆2上。在两个桅杆之间,升降平台由伸缩台和控制站引导。维护平台也连接到上部区域的两根桅杆上。上十字头堆垛机上部为上十字头。这包括一个抗扭刚焊接框架。通过导辊在上部十字头上,堆垛机在机架结构上部区域的轨道上引导。外导向轮和内导向轮用于使钢丝绳偏转。如果举升平台移动超过其上端位置,则缓冲器会减弱冲击.缓冲器与堆垛机运输部分上的缓冲器一起,避免与第二堆垛机发生碰撞。
堆垛机的电气控制模式手动控制:堆垛机处于手动模式,不接受任何自动任务,只能手动控制堆垛机的手动控制。操作人员通过操作面板直接操作机构,包括三个动作:水平操作、提升装载平台和叉的伸缩;单机自动:堆垛机处于自动模式,只接受本地任务,不受WMS控制。操作员按下机载电控柜上操作面板上的按钮,输入进仓(出仓)指令,堆垛机自动完成进仓(出仓)操作,返回仓端等待订单;在线自动控制:在自动模式下,堆垛机只接受仓库管理系统(WMS系统)的任务。在计算机控制室,操作员通过操作终端输入进/出任务或进/出指令,计算机和堆垛机通过红外通讯将进/出指令连接到堆垛机,堆垛机自动完成进/出操作。操作人员通过监控电脑屏幕的动态画面,可以实时了解堆垛机的位置和运行状态。堆垛机由机架、水平行走机构、提升机构、载货台、货叉及电气控制系统构成。

堆垛机使用方法:堆垛机可以在三维空间移动负载:沿着过道中的货架(行驶,x方向);货架高度(升降,y方向);朝向货架(Z方向)。运输部分:堆垛机的基础就是运输部分。这包含一个抗扭钢焊接框架。机架两侧的驱动轮由质量钢42CrMo4制成,强度较高。车轮两侧均采用闭球形滚装机支撑,通过运输部件上的轴承箱连接的轴承。运输部件的驱动通过2个螺旋锥齿轮装置行进。运输部分由导轨上的导向辊引导,确保传动装置的正好对中轮子。轮子滚轮可通过偏心装置进行调整。作为防倾装置的夹轨器是运输部设备的一部分。钢轨刮削机清理导轨上的异物,从而防止车轮损坏。缓冲器与堆垛机上横梁上的缓冲器一起防止与第二台堆垛机发生碰撞。对于维护工作,可以将举升平台放置在缓冲器上。6个双收集器从安装在基础上的导体轨道获取堆垛起重机的动力。有轨巷道堆垛机、无轨巷道堆垛机和普通叉车是立体仓库中运用的主要作业设备。河北自动堆垛机厂家供应
巷道式堆垛起重机的仓库高度可达45米左右。河北自动堆垛机厂家供应
堆垛机控制系统硬件配置完成后,将变频器的输入与输出(I/O)配置文件与PLC输入与输出映像区匹配,将PLC的输出区对应变频器的输入区,PLC的输入区对应变频器的输出区,变频器通过改变参数状态字来接收频率脉冲调速或转速调速并反馈信息。堆垛机控制系统水平轴调速分为手动运行调速与自动运行调速,手动调速是在堆垛机上,用操作手柄控制堆垛机低速前进、低速后退、高速前进、高速后退,在地面设有强制换速开关,高速运行到巷道端头后切换到低速运行。自动调速是堆垛机在联机模式下收到入库、出库等指令后根据运行距离自动由静止状态开始加速到高速运行,然后到目标货位后减速运行到准确停车。河北自动堆垛机厂家供应