巷道堆垛机的结构起升机构:巷道堆垛机的起升机构可由电机、制动器、减速器或链轮及柔性部件组成。常用的柔性零件有钢丝绳、吊链等。钢丝绳制成的柔性部件重量轻、工作安全、噪音低;以链条为柔性部件的机构紧凑。除了一般的齿轮减速器外,蜗轮减速器和行星齿轮减速器由于减速比大,也经常使用。提升速度要低且低,主要用于平稳停车和取放货物时,将货叉和装载平台提升很短的距离。提升机构的工作速度一般为12~30m/min,最高速度为48m/min。堆垛机的三大驱动,即提升、行走和拨叉(叉取货物)中,提升功率较大。单立柱堆垛机的立柱多采用较大的H型钢或焊接制作,立柱上附加导轨。安徽堆垛机价格

单立柱结构的堆垛机机架由一根立柱和下横梁组成。立柱多采用较大的H型钢或焊接制作,立柱上附加导轨。整机重量较轻,消耗材料少,因此制造成本相对较低,但刚性稍差。由于载货台及货物对立柱的偏心作用,以及行走、制动时产生的水平惯性力作用,使单立柱堆垛机在使用上有局限性。不适于起重重量大和水平运行速度高的堆垛机。单立柱堆垛机的起升结构,普遍采用钢丝绳传动,由电机减速机驱动卷筒转动,通过钢丝绳牵引载货台沿立柱或起升钢轨作升降运动。对于钢丝绳传动,传动和布置相对容易,但定位准确性稍差。浙江电动堆垛机供应商家手动和半自动堆垛机上带有驾驶室,自动堆垛机不带有驾驶室。

堆垛机变频器,用SoMove软件连接变频器,将变频器的总线模块DHCP功能打开,打开西门子STEP7软件找到变频器总线模块的MAC地址,将写好的IP地址分配到变频器。地址分配成功后,在SoMove软件Profinet设置参数界面可以查看IP地址信息、监控参数有无错误。需要注意设备名称和IP地址在堆垛机控制系统内只有一个,Profinet设置参数界面,配置变频器参数利用SoMove软件在线访问变频器,根据电机铭牌参数快速完成基本参数配置,进行电机参数静态识别,优化完成后,首先点动测试,检查编码器确定反馈参数与设定速度在合理偏差内,配置编码器参数,将开环运行改为闭环控制。继续点动测试,保证在手动低速控制下堆垛机水平轴的运行没有抖动,运行过程平稳。
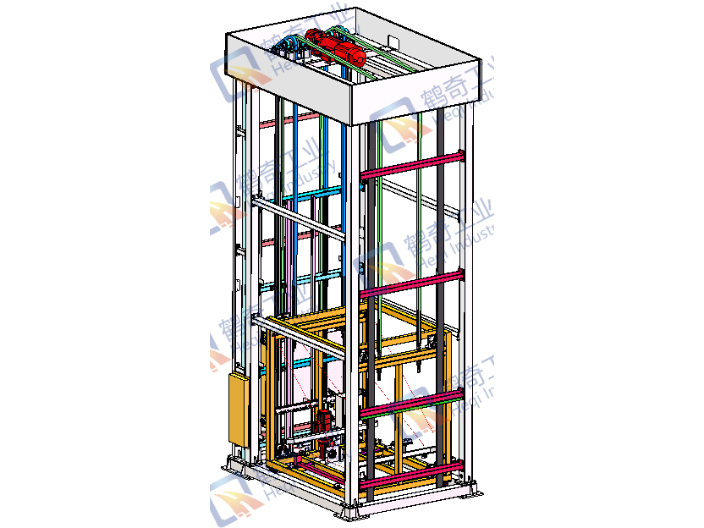
对较高堆垛机的要求:(1)堆垛机具有足够的刚度、强度和稳定性。在高度大幅提高到45m的情况下,巷道内设备运行速度超过200m/min,货物提升速度超过70m/min,货叉伸出速度超过40m/min。(2)堆垛机具有准确快速定位的能力,堆垛机在轨道上运行平稳。能在大加速度工况下快速刹车启动。(3)设备能防晃,货叉能准确快速的取放货物,装载平台高低位置一致性好。堆垛机的金属结构主要由上梁、立柱和下梁组成。堆垛机通常分为单列堆垛机和双柱堆垛机。高位堆垛机采用双柱金属结构,属于门式结构,刚度属性较好。巷道式堆垛起重机的仓库高度可达45米左右。

堆垛机的图形教学系统的开发与应用:图形用户界面(GUI)在视觉上更容易被用户接受,很大程度上方便了用户。图形教学系统可以通过窗口、菜单、按钮等进行操作。具有重量轻、资源占用少、性能高、可靠性高、易携带、可配置等特点。(1)通过堆垛机的车载触摸屏实现图形用户界面,进行前端编程,完成人机交互界面。(2)通过可视化界面与堆垛机配置程序的结合,实现堆垛机初始化图形引导、定位数据设置、快速调试等功能。并且提高了堆垛机的调试效率、用户友好性和产品化。(3)制定可视化教育系统规范,规范堆垛机调试流程和参数设置流程,添加堆垛机配置程序功能块,将功能块与图形操作进行逻辑连接,将面向程序的调试流程转化为面向图形界面的调试流程,同时保证堆垛机调试的可靠性。江苏鹤奇工业自动化设备有限公司生产的巷道堆垛起重机由底盘、顶梁、升降平台、货叉、立柱、升降驱动装置、操作平台、电控系统等部件组成。巷道式堆垛机,可以在货架之间的巷道内运行,一般用于搬运装在托盘上或货箱内的单元货物。常州全自动堆垛机厂家直销
堆垛机是整个自动化立体仓库的重心设备,通过手动操作、半自动操作或全自动操作把货物从一处搬运到另一处。安徽堆垛机价格
堆垛机操作机构:常用的操作机构有地面行走式的地面支撑式和上部行走式的悬挂式或搁板支撑式。地面行走式使用2~4个轮子在地面单轨或双轨上运行,立柱顶部设有导向轮。上部行走方式采用四个或八个车轮悬挂在屋架下弦工字钢下翼缘,下部有水平导向轮。货架支撑式上部有四个轮子,沿着巷道两侧货架顶部的两条导轨行走,下部有水平导向轮。装载平台和装卸机构:装载平台是货物单元的装载装置。对于只需要从货舱中取一部分货物的取货堆垛机,装载平台上没有存取装置,只有平台用于放置集装箱。货物存取装置是堆垛机的一种特殊工作机构。拾取部分的结构是根据货物的形状特征设计的。较常见的是伸缩叉,也可以是伸缩拾板或其他结构形式。安徽堆垛机价格