-
 河北汽车自动化配件价格10.21
河北汽车自动化配件价格10.21针对中、小型数控设备的成本与性能平衡需求,白山机电经济型驱动器以 “高适配 + 低成本” 打开市场。该驱动器采用类似伺服控制原理的电路,使电机运行几乎无震动、无噪音,营造安静的生产环境,同时定位精度比...

-
 云南非标自动化配件批发10.20
云南非标自动化配件批发10.20白山机电 D2HB44M 驱动器,专为解决步进电机 “高速力矩下滑” 痛点研发,成为超高速运行场景的关键配件。步进电机因自身特性,转速提升时易出现输出力矩衰减,导致设备无法满足高转速作业需求,而 D2...
-
 黑龙江一站式自动化配件定做厂家10.20
黑龙江一站式自动化配件定做厂家10.20经济型驱动器是白山机电针对中、小型数控设备打造的高性价比解决方案,内部采用类似伺服控制原理的电路设计,让电机运行平稳度实现质的飞跃,几乎无震动、无噪音。其定位精度比较高可达 40000 步 / 转,能...
-
 贵州工业自动化配件要多少钱10.19
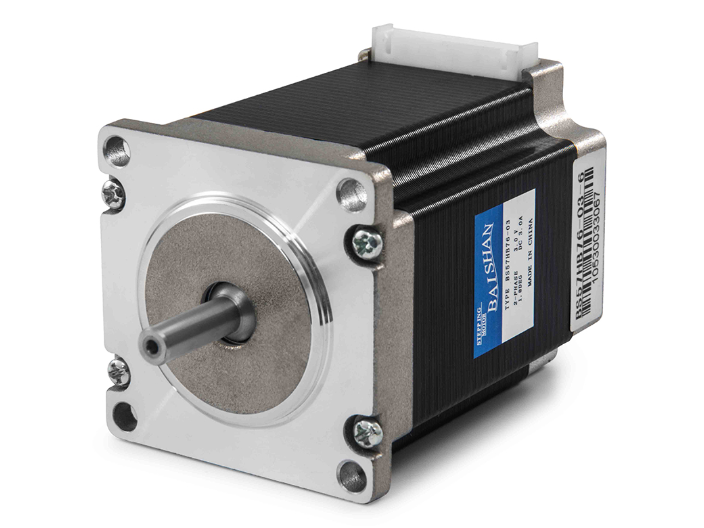
贵州工业自动化配件要多少钱10.19白山机电 “BS” 步进电机驱动器 —— 高速性能优化自动化驱动部件 白山机电的 “BS” 步进电机驱动器在自动化配件领域,针对设备高速运行需求进行了专项性能优化,成为提升自动化设备高速运...
-
 黑龙江7.5kw机电加工10.19
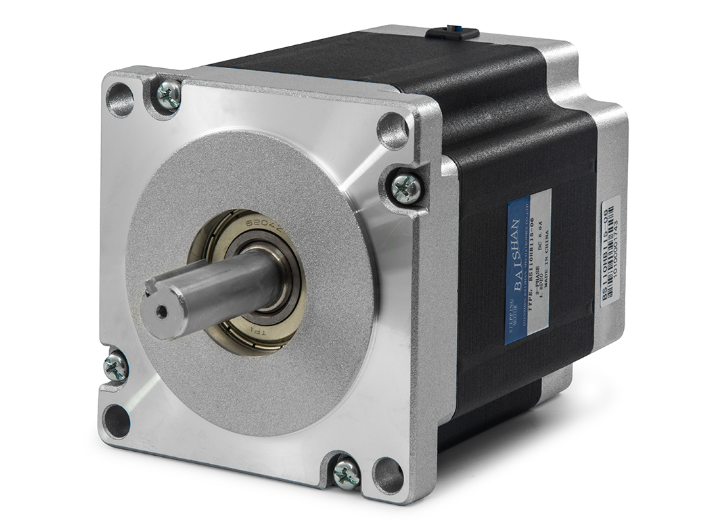
黑龙江7.5kw机电加工10.19白山机电的产品体系丰富多样,涵盖步进电机、驱动器、变频器等,拥有四个系列超 80 个品种,规格完备,无论是小型设备的精细驱动需求,还是大型机械的强力动力供应,都能提供适配方案。以其在纺织印刷行业的应用...
-
 黑龙江工业品自动化配件要多少钱10.18
黑龙江工业品自动化配件要多少钱10.18成立于1997年的深圳市白山机电一体化技术有限公司,作为专注自动控制机电产品的高科技企业,二十余年来始终以“品质与诚信”为基石,在自动化配件领域构建起覆盖“驱动+控制+执行”的完善产品生态。公司自动化...
-
 上海五金自动化配件厂家直销10.18
上海五金自动化配件厂家直销10.18支持多轴简单运动控制、逻辑控制等基础自动化功能,能满足包装机械、标记机、小型数控机床等设备的基本自动化控制需求。在操作便捷性上,该控制器配备了直观的参数设置界面,操作人员可通过按键或上位机软件快速完成...
-
 河南30千瓦机电厂家直销10.17
河南30千瓦机电厂家直销10.17白山机电 “BS” 步进电机驱动器系列以 “全品类、高性能” 为关键优势,涵盖四大产品系列、30 多个品种,多方位覆盖不同行业、不同场景的动力需求。该系列产品既包含适配精密仪器的高细分驱动器,也有满足...
-
 吉林20千瓦机电生产厂家10.16
吉林20千瓦机电生产厂家10.16针对中小型企业对成本与性能的双重需求,白山机电推出的经济型驱动器,以高性价比优势覆盖包装机械、电脑绣花机等轻工业领域。该驱动器采用类似伺服控制原理的电路设计,在保证运行平稳性的同时,将设备震动与噪音控...
-
 四川20千瓦机电价格多少10.16
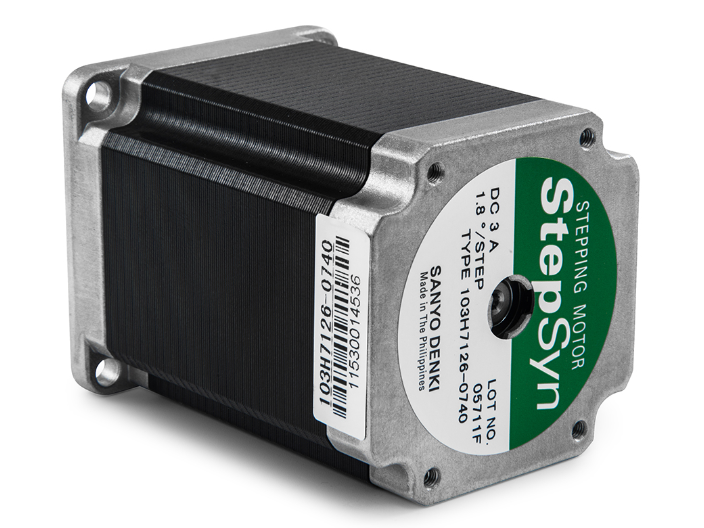
四川20千瓦机电价格多少10.16在运行稳定性方面,SANYO 二相混合式步进电机采用优化的磁路设计,减少运转过程中的力矩波动,确保设备运动平稳,如在激光雕刻设备中,稳定的动力输出能保证雕刻轨迹流畅,提升雕刻效果;在电脑绣花机中,均匀...
-
 广西90千瓦机电生产10.15
广西90千瓦机电生产10.15白山机电深耕工业自动化领域,自主研发的等角度恒力矩细分型驱动器,采用伺服级控制原理,可将电机高速性能提升 30% 以上,同时减少 50% 的运行发热,明显降低设备能耗与维护成本。其创新的微步细分技术实...
-
 云南37kw机电厂家10.15
云南37kw机电厂家10.15针对中小型企业对成本与性能的双重需求,白山机电推出的经济型驱动器,以高性价比优势覆盖包装机械、电脑绣花机等轻工业领域。该驱动器采用类似伺服控制原理的电路设计,在保证运行平稳性的同时,将设备震动与噪音控...